jeybee
February 17, 2009, 4:59pm
2
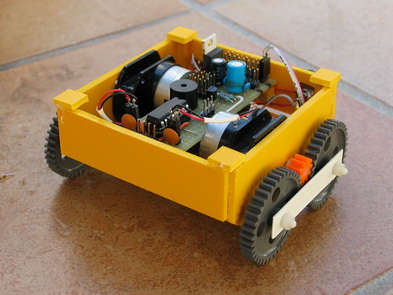
I like it!
I like that little Robot, Good Job!!
But I think, you smoke too often…
sweet unit
noise0
February 17, 2009, 5:08pm
4
mahahahah u r right!
noise0
February 17, 2009, 5:10pm
5
slick
February 17, 2009, 5:13pm
6
huh?
It seems like the wheels
mike
February 17, 2009, 5:24pm
8
The in-between gear is an
guibot
February 17, 2009, 5:31pm
9
very nice little fellow!!and
noise0
February 17, 2009, 5:36pm
10
the in-between gear is not pinion which transmit power to both wheels
slick
February 17, 2009, 5:50pm
11
**but…but…but…but **
noise0
February 17, 2009, 5:51pm
12
no, exactly in the same
mike
February 17, 2009, 5:54pm
13
Same difference
noise0
February 17, 2009, 5:59pm
14
lol i like to write in
rik
February 17, 2009, 6:38pm
15
impressed by all these new robots
This series is the exact reason why we did not
Nice to meet you and your bots Sir.
lolgeek
February 18, 2009, 12:30am
16
This bot is very cool.
Really fun little design,
mike
February 18, 2009, 2:39pm
18
Irony
A little more info…




 lol
lol