Hello, I have a tank bot project using tamyia tracks. Is it possible to attach them directly to servos? is a gear box existing for servo/tamyia tracks? I don't have any motors and motor controller. Or do you know any cheap tracks compatible with servos?
Thanks for all reply.
I have continous servos
Yes I only have continuous servos. I have the Bot board 2: https://www.robotshop.com/eu/productinfo.aspx?pc=RB-Lyn-37&lang=en-US
And I don’t think it is possible to plug in directly the motor, only to buy a motor controller, wich I don’t have.
pololu has a bunch of tamiya
pololu has a bunch of tamiya gearboxes: http://www.pololu.com/catalog/category/34
tamiya uses a hexagonal shaft and most other stuff is incompatible.
**I don’t have any motor controller **
There is no gearbox for servos there.
DJ has post a list of
DJ has post a list of gearbox that fits tamiya tracks such as this one I am using:
http://www.pololu.com/catalog/product/61
If you insist to use servos, make sure they are continues servo and also you might need to have some tools and skills to modify the hub and shaft to assemble them.
servos are handy because
servos are handy because they allready have gears in them.
the problem here is that they are simply not going to fit your tamiya track set.
you could use them to drive a bot, there are wheels that are made to fit servo hubs,
and even adapter rings to fit wheels with different connection types, just not with the tamiya track set.
Motor controller
Yes you are right, and I’m not enough skilled to modify the servo. But I never used any motor and motor controller. Where do I need
to plug it in my bot board, and how do I program it? Wich motor controller works with wich tamyia motors?(I use a BS2 and a bot board V2).Any information about motor controllers and motor will be useful for me and my project.
what you need is a gearbox
what you need is a gearbox to fit the tracks (they come with motors included) and a motor driver,
a divice that lets you control the motors from the BS2, but power them directly from the power source, because
they need more then the BS2 can provide.
i don’t know what ‘bot board v2’ is, but it sounds like it might have a motor driver built in.
Bot board 2
A link of my bot board: https://www.robotshop.com/productinfo.aspx?pc=RB-Lyn-37&lang=en-US
and yes I’m almost sure I need a motor driver because in the manual it shows an example of a motored robot and it shows a motor driver. What do you mean by : “but power them directly from the power source, because they need more then the BS2 can provide.”
does that mean that:
battery – bot board
|
motor driver
and that the motor driver is connected to the battery and not the bot board?
For the motor driver, what are the commands for it to use the motors?(I use PBasic)what motor driver would be the best and the cheapest for my project and microcontroller?
yeah you connect power
yeah you connect power directly to the motors, and you connect I/O lines from the board to the motor driver to tell it what to do.
a motor driver will have 2 inputs for each motor, 1 for normal and one for reverse.
to use it you just connect those inputs to I/O on your board.
then depending on which motors you want to turn, and in wich direction, you set the corresponding I/O
on the board to high.
i don’t much about your BS2 board, or motor controllers to recommend a specific one.
some one else will have to answer that.
Mixed up everything
Thanks for youre reply. I’m not really good in electronics what does 1/O correspond to + and -?
and I think I mixed up everything :P. Is it this:
Battery – Botboard
| | (1/O)
motors motor driver
Or this:
Battery – Bot board
|
motor driver
|
motors
Did I mixed up everything and I’m a noob? 
I think tlling me what is 1/O would help me.
Thanks for you’re patience ^^
**Motor driver **
Ok I’ve informed myself a bit, so tell me if what I understood is good:
The 2 motors are connected to the battery and the microcontroller:
motor — motor
| |
Battery – bot board
The motor driver have 2 or more inputs I have to connect to the 1/O inputs/ outputs to the bot board:
po1 2 3 4 5 6 7 8 9 10
on this line I can connect the motors
. . . . . . . . . . . another row of pins
. . . . . . . . . . . . . another row of pins
And to use the motors I program it like that: (for example)
High 0, 100
High 1, 100
…
Tell me please if anything is wrong
the connections are like
the connections are like this:
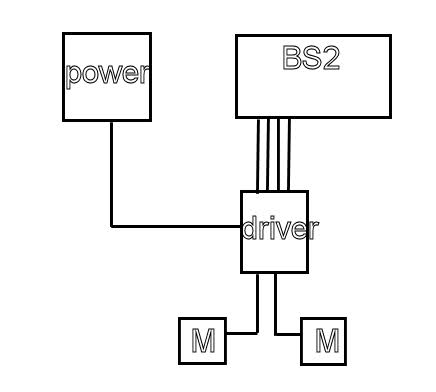
see the power goes streight to the driver, and from the driver it goes to the motors.
the BS2 I/O tells the driver when and how to apply power to the motors.
i dont know stamp basic but yeah thats looks about right.
That’s much more clear for me 
Thank you very much It’s much more clear for me now. But like for this motor driver:
https://www.robotshop.com/eu/dfrobot-4-8-46v-2a-dual-motor-controller-3.html
It is a low cost motor driver for 2 motors. Do you think it is compatible with my bot board?
And there’s so many inputs / outputs where does each one goes?
2 Motors connect on each
2 Motors connect on each left and right Terminals (blue part with 2 screws)
Battery connect to that 3 screw termainal at bottom.
And there are 2 pins on each side of battery terminal, they are for direction and speend control which connect to your arduino digital pin.

Mine maybe looks a bit different but works the same at lower-right cornor. (Sorry it's not clear but that's the only image I can find).
Thanks a lot
Thanks for everyone I have a better idea for my project now.
ChuckCrunch : Yeah if you find you’re Pbasic code for motor tell it please. thanks 
Oh a last question hard mouse: My battery has 2 wires (+,-) so I won’t plug them in the same input (at the middle of the 3 inputs at the bottom of the motor driver), should I?
I think you plug +red wire
I think you plug +red wire from battery to VS on board and -Ground balck wire into Gnd on board.
**Ok **
Thanks a lot. and then for the 2 other blue parts on the side of the battery terminal, I should buy a conector like that:
https://www.robotshop.com/eu/lynxmotion-power-cable-8-pc-01.html
and cut one of the end to plug them in those two inputs in the motor driver? And then plug the other side on my bot board?
For those signal pins, I got
For those signal pins, I got bunch of these wires:
http://www.dfrobot.com/index.php?route=product/product&path=44&product_id=356
You can rip them to double or single wire or whatever you like.
Ok thanks
Yeah those ones are cheap and look good. Now that I have all the informatin I need, I’ll buy everything I’ll need :).





