

Working on my Tamiya tank chassis based autonomous robot.
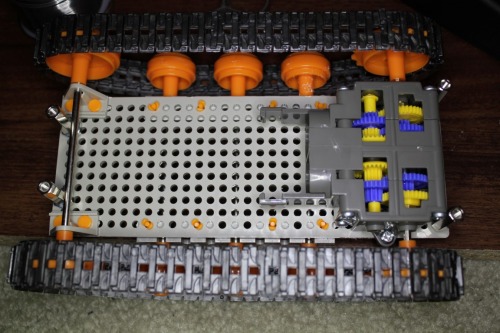
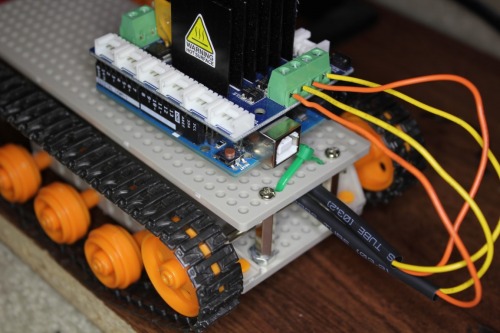
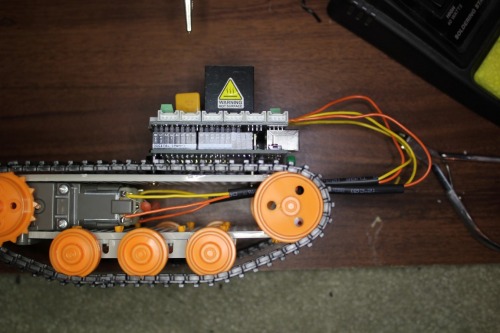
Uses a Tamiya chassis with Tamiya universal plates and a twin gearbox for forward, reverse and turning. Arduino Uno R3 with a Seedstudio motor shield v1.2. Power is controlled through an on-off switch from a 4 AA battery pack at 6V.
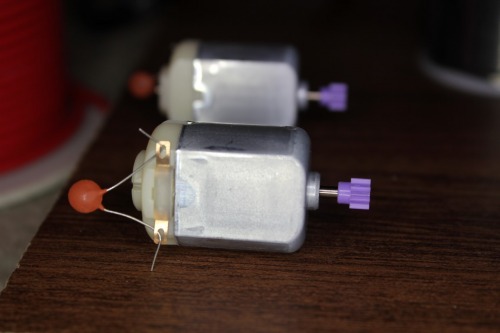
The Tamiya plate has to be modified to work with the twin gearbox, notably involving slotting the sides and enlarging two holes, otherwise it works absolutely perfectly. I used some scavenged standoffs to get the spacing, which comes out to about 1" between the plates. The heat shrink on the motor wires is not actually shrunk down but is just there to help keep the wires together and clean up the look a little. I will be clipping those wires down to fit more securely later on down the road.
The Arduino is currently powered by the 6V pack, but I will definitely be changing that to give the Arduino its own seperate power supply. I think it will still work ok for now since the servo/ping sensor don't run at the same time as the tracks, but I do want to make that a possibility so the robot can have an active sonar system at some point. I'm also going to add an LED to the on-off switch as well at some point and probably some LED's to the front to give it 'headlights'. I also have several NC/NO microswitches to install on the front and rear to act as impact detectors.
Currently I'm about to get the Arduino code written to drive the motors and get it cleaned up and modularized, and once that's done...
I'm adding a servo with parallax ping))) sensor and hopefully getting my robot navigating by itself!
Feel free to message me or comment, and I will be adding video for the end result. I may or may not add the code as well, but if people would like to see it or would find it useful I can add it when it's working. I will also update this regularly as I complete more of the robot.
More images:
2/8/2015 - End of day conclusions:
I finished all the mounting and wiring and first wrote the test code to make it go forward, backwards, turn left and right and full stop. Everything worked perfectly. Added the servo to the front (did I mention I LOVE zipties?). Ran into the first problem when I added a control for the servo via the Arduino servo library. Turns out that the servo library disables pins 9 & 10 for PWM, which since my motor shield uses those two pins it killed my ability to move the robot. The shield is hardwired, and the library can't be changed. I ended up switching to a hand written library that uses analog instead and no timers. It doesn't work perfectly but the bot can now control it's movement and sweep the servo in front a full 180 degrees. Next edit will be to add photos of the servo mounted, the ping sensor mounted, and report back on whether or not everything is playing nice. Hopefully this will include a video of it actually moving around!
Navigates via ultrasound
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/tamiya-and-arduino-based-rover-robot