

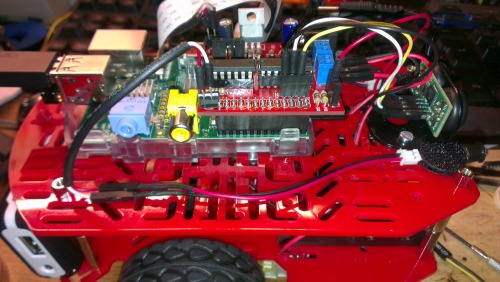
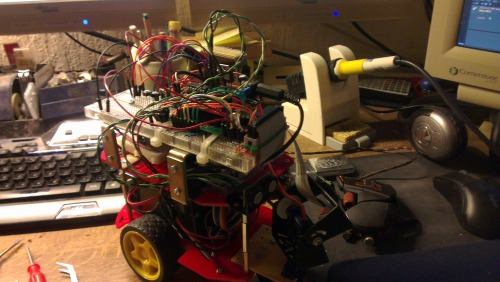
Raspobot,
my bizarre version, an autonomous robot.
first steps





today:
Hardware components:
Chassi:
Acrylglass 5 mm
1x 2WD Robot Car Chassis 2 Motors Dagu Magician Robotics Platform
2x Wheels
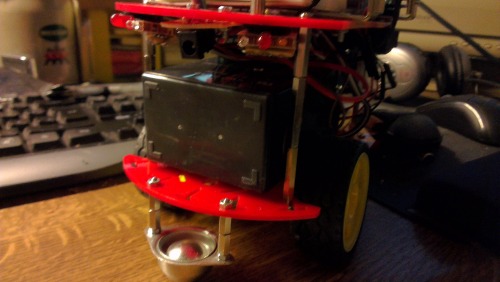
2x Furniture Castors
1x Casterwheel
5x 830 Breadboard
1x 400 Breadboard
1x Batteriehalter Batterieclip Anschlussclip für 9V
Aktoren:
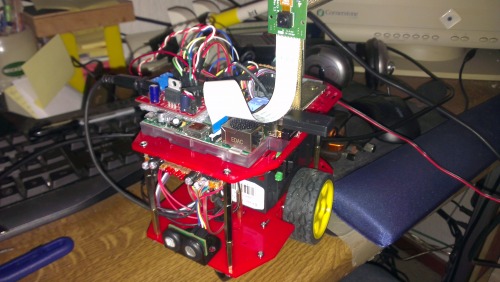
1x Dagu Sensor Pan/Tilt Kit mit Servomotoren
1x 180° TowerPro MG995 Metal Gear Digital Servo Hi Torque HPI Savage XL FUTABA 55g
2x Dagu DC Gear Motor Paar - 90 Degree Shaft
2x 5 mW Lasermodule HLM1230 Linie, 650nm Red Laser Line Diode
Platinen:
1x Raspberry Pi 2 B + Raspicam
1x Arduino Nano V3
1x RaspiRobot Board
1x Levelshifter
1x 128x64 OLED Display
1x 16-Channel 12-bit PWM/Servo Driver-I2C interface-PCA9685 for Arduino
1x 2/ Channel Kanal 5V Relais Relay Module Modul f Arduino DSP AVR PIC ARM C8
1x LM386 Super MINI Amplifier Board 3V-12V Power Amplifier DE
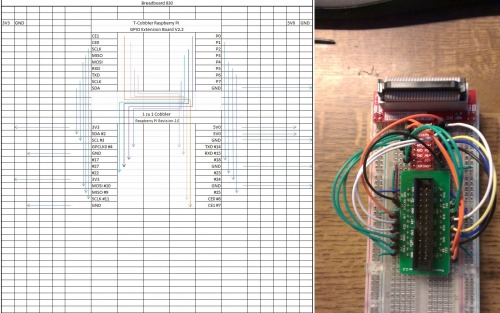
2x MCP23017-E/SP 16 I/O Expander mit/ohne DIP28 I2C
1x Raspberry PI GPIO adapter connvetor module for breadboard RP02005 C31
1x T-Cobbler GPIO Breakout Kit für Raspberry Pi inkl. Breadboard / Steckboard
Sensoren:
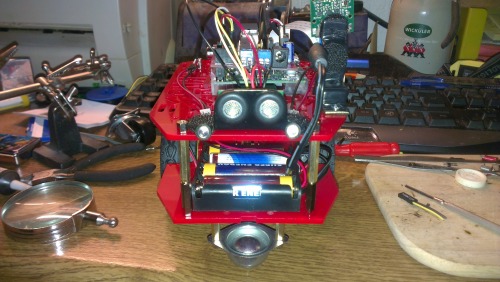
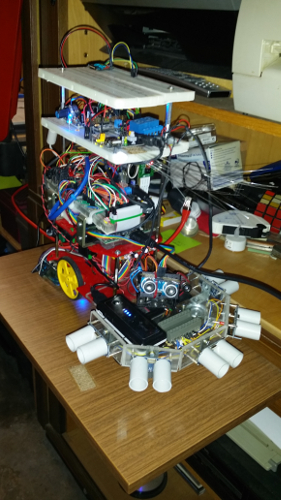
6x Sensor HC-SR04
1x MCP9808 Temperatursensor
1x TSL2591 Licht / IR Sensor
1x GY-521 Dyrosensor
1x HMC5883L Magnetkompass
Stromversorgung:
1x 3.3V/ 5V Netzteil-Adapter Supply Power Module Adapter für Modul MB102 Breadboard
1x 5V 5600mAh Anker® Astro USB Externer Akku Pack Power Bank Ladegerät mit LED
1x 7,4V 5000 mAh Lipoakku
1x 9V 200 mAh Blockakku (only for the LM386 Board and one phone Optipiont 410 speaker)
1x 5-15V (7,5V) 3000mA Goobay NTS 3000 Universal Netzteil Ladegerät einstellbar 8 Adapter (for developing)
many cable, resisters, switsches, taster, distance bolts, angle and alot of LED´s
A Samsung Tablet for remote Controll.
Software:
OS Debian 8 Raspbian Jessie Lite
Python
Arduino C
Andriod Java
Significant changes:
Conversion of Raspberry Pi 1 Modell 2 B
The distance measurement is performed on a Arduino.
The measurement data is retrieved by the Raspberry Pi via the serial interface.
An OLED display for graphical outputs were added.
Various sensors have been added for added functionality.
See hardware components.
to be continued.......
Navigate around via ultrasound and talk
- Actuators / output devices: 2 motors, 1 Servo
- Control method: Remote over Internet (Wlan between robot and access-point)
- CPU: Raspberry Pi 2
- Programming language: Arduino C, Android Java, Python 2.7
- Sensors / input devices: HC-SR04 ultrasonic sensor, Parallax HMC5883L Compass
- Target environment: indoor flat surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/talking-raspobot