

T.W.E.R.P. - The Wandering Electronic Robotics Platform was built to test sensors and code for future projects . The platform is the bottom of a RAD 1.0 robot (I have another complete so I chopped this one up) that has a high/low speed switch. 6v alarm battery powers the drive motors, 4 AA rechargeables in a case power the Arduino "brain". SR04 ultrasonic distance sensor sits on a small actuator for obstacle avoidance and to determine a clear path. IR proximity sensor mounted low like a bumpswitch for small obstacles not picked up by ultrasonics. The next project will be W.A.S.P - Wandering Automated Security Platform which will be a modified Omnibot 2000, I plan to paint it, make both arms moveable, possibly controlled over Internet, with video camera and speech. This will be a security robot to guard the house while I'm away.
http://www.myspace.com/video/protalent/twerp-on-the-loose/108780784
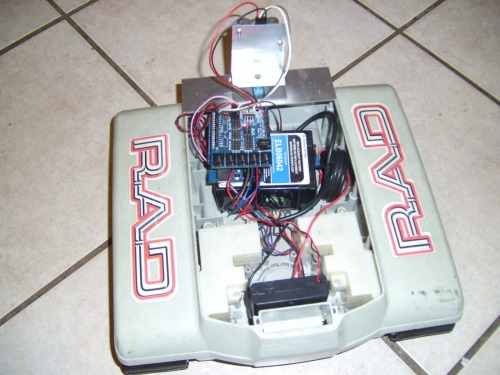
6v SLA drive motor battery, 4AA rechargeable battery pack for Arduino, L298N based motor controller shield & sensor shield.
*** UPDATE *** I modified the code to keep from getting stuck in corners. Now the LookAround() function sweeps right & left 180 degrees in 40 degree increments then maps the angle to a variable for delay time when turning. I tried to approximate the max distance angle with the actual turn angle and it looks close (I'm no math wizard but I'm sure there's an equation for that). So while moving forward it does a quick right/left look when an obstacle is detected which is fine for normal navigation but in a more complex environment, like a corner, it does a wider search for the optimal path.
11/27/2013
Successfully integrated remote control by adding a wireless PS2 controller. No video at this time but this is not a quality upgrade. Maybe it's because of using a cheap knockoff controller purchased through Ebay. In researching on the 'Net it seems there is varying success. It sometimes gets a little erratic thinking it got a joystick signal when it hasn't even though I compensated by adding a dead zone around the joystick center as it's very touchy. The buttons seem to respond as they should however I'm only using the L1 + Left Stick for direction and R1 + Right Stick for servo sweep. This code will be integrated into my BigBot project to drive it around and pan/tilt a camera. Left Stick controls forward, reverse, left turn and right turn. Right Stick (since TWERP only has an ultrasonic sensor on a servo I'm only using the x-axis) for left/right sweep. The PS2 Shield from Cytron looked good but the price more than doubled with shipping added so I went with PS2 Connector and PS2 Wireless Controller Receiver Level Shifter from https://www.robotshop.com/ (I was already getting an order together and they were really cheap). I probably should have bought the complete setup from them but I had already ordered the controller + receiver on Ebay and was just looking for the connector.
8/1/2015
TWERP made his public debut at Robotics Day @ Melrose Center at the Orange County Public Library in Orlando, FL. Only a few minor changes (had to update the power source to handle the growing pool of sensors, results were getting flaky) since my last update but that was the only project I had available on fairly short notice. Also had to modify and clean up the code since it's a test platform and I'm constantly trying different things. I got to talk to a lot of kids, really smart kids, about robots and how the sensors work. I'm almost tempted to take it to the upcoming Maker Faire but I would prefer getting my BigBot project to a point where I can show that instead. I should be able to do that in the six weeks I have before the Faire if I don't get sidetracked. This is all new for me and I enjoyed it enough to want to do a few more.
Wanders around sensing obstacles with ultrasonic & IR sensors.
- Actuators / output devices: one servo
- Control method: autonomous
- CPU: Arduino Duemilanove
- Power source: 6v battery
- Programming language: Arduino
- Sensors / input devices: HC-SR04 ultrasonic sensor & IR Proximity sensor
- Target environment: Indoor/Outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/t-w-e-r-p-test-platform-for-robot-hardware-software
