

I have a castle creations BEC 2.0, and would like to use a lipo battery with it to lower the voltage to 6v for my t-hex. How would i go about wiring the BEC unit to be used with my SSC-U board for proper power deliver for the 24, 6 volt, Hitec HSMG servos. New to this, so I a at a loss as to how the wiring should go.
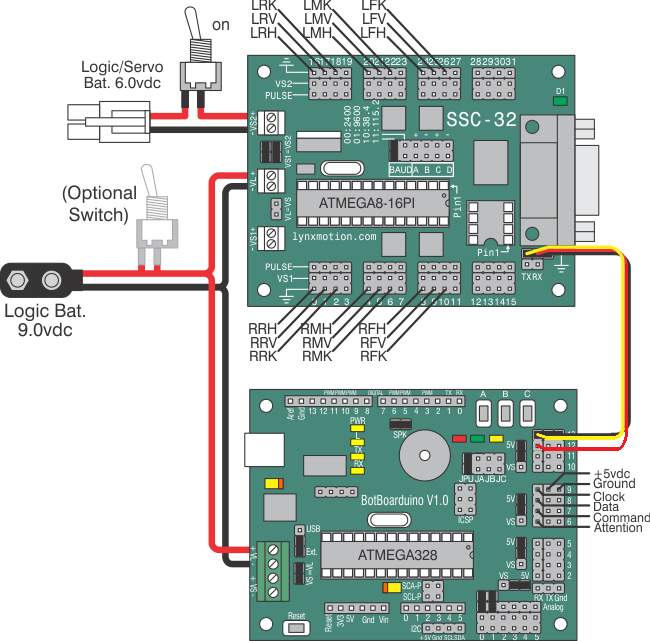
Looks like you’d connect the LiPo to the BEC input, and the output to the VS1 terminal of the SSC-32U, keeping the VS1 = VS2 jumpers in place.
Not sure what the 3-pin output connection does - you’ll need to research that, and note:
“2. Adjustable Output Voltage may be set with Castle Link (sold separately).”
1 Like
Finally got the servos all connected and recognised in the servo sequencer utility. Now im stuck on getting ps2 controller functionality, setting up in arduino ide. And uaing the bluetooh bee that i got as well. Thia will.probably be long exchange, but im excited to learn. Thanks in advance.
When connecting the PS2, ensure that the pins connected to the BotBoarduino match that of the code. For example the pinout for the sample code on the Lynxmotion GitHub would use these pins (5V, GND, CLK, DAT, COM, ATT):
1 Like
Aside from the servo sequencer,what other software.will i need to get my.bot up.and running and controllable? I also have the arduino sketch aoftware but dont know how to select my board for that software.
There’s sample code for 3DoF hexapod robots called the “Phoenix Code”, and the 4DoF may have some issues, which is why a 4DoF T-Hex with electronics is not available online. The code is here:
Assuming you have the BotBoarduino, you’d need to read this manual. In the Arduino software, the board is a Duemilanove.
1 Like
so, everything powers on, servos have been calibrated and can stand, ps2 v4 controller pairs and theres a beep. With the code from that github link, do i upload everything or just the BotBoarduino ch3r ps2.ino. and do i need to change any values within the code first or adjust after it works?
update, got the bot to power up with ps2 start button. bot assumes partial position with legs twitching and ps2 controller losing connection. im assuming theres a line of code i need to adjust. any tips?
So got the hex walking, but dealing with voltage drops that reset the board and power down the robot. Im using a tenergy 6v 2000mah battery atm. Would i benefit from using a 9v to power the logic seperately? Currently the bot powers up with the start button on the ps2 v4 controller then almost immediately powers down and resets to rest.
Can certainly try, and be sure to remove the VS = VL jumper (since the logic voltage would no longer be the same as the servo voltage).
Sounds like the battery can’t provide enough discharge current for all motors.
1 Like
Thanks! If that still uant providing stable voltage, would 2 batteries be the final idea?
Also, how many amps should i need to power the 24 hitec HS-645MG servos? Im wondering id the 6volt battwr i have isnt puahing enough and thats causing the voltage drop as well? Using 16 awg wire too for the battery to the screw terminals. And i have 2 of the batteries so maybe running them for each side of legs might be better? Thanks again for all the assistance.
Update: the 9v has solved the voltage drop and bot is functional. Still havent figure out the BEC unit. Voltage fluctuating causing servo stutter when using to drop 7.4v to 6v.
Happ to hear. Knowing the full current drain on the battery at any time in the motion is not easy unless you have external electronics (DC current sensor). Indeed, one option would be to provide VS1 with its own battery, and VS2 with another. To be overkill, VL could operate on its own at 9V. However, the robot was able to work with a 2800mAh NiMh with slightly higher than normal discharge, and as you’ve seen the 9V helps stabilize the VL. Not sure about what’s happening with the regulator unfortunately.
1 Like
Update, everything was in order untill one of my hitec hs 645mh servos died. Im not sure what happened, but the servos are new and im worreid the other 23 could suffer similar failer. And that would be a price replacement job. Any tips or way i can replace the dead servo? And any alternative servos i could use for my bot?
Check the connection between the servo and the board - if you’re using servo extensions, it’s possible that it disconnected. While there, check that the pin to pin connection is correct (black to blac, yellow to yellow) and that the connection to the board is also correct.
Replacement 645MG: https://www.robotshop.com/products/hitec-hs-645mg-servo-motor
Do you have any other device which you can use to test if the servo works, like an RC transmitter?
If not, try connecting that one servo to the board directly and use the SSC-32 Sequencer software to see if it rotates.
How can you tell it’s not working - does it make a grinding noise or have a burnt smell?
1 Like
So, no burning smell, no grinding noise. Other servos respond when plugged into the same output pins. Dead servo still has no response or activity when plugged into other pins. I do not know how it died.
The brackets are made for Hitec standard sized servos like the 322, 422 and 645MG. The 645MG and 5645MG can provide high torque for their price which is why they’re used. The others are less powerful and not suitable for a 4DoF walking robot. You’d really need a new 645MG:
1 Like
- Set the BEC to 6V using Castle Link.
- Connect LiPo +/- to BEC input.
- Wire BEC output +/- to SSC-U power input.
- Plug servos into SSC-U board.
- If SSC-U has separate power, remove BEC’s red wire.
- Test everything—servos should run smoothly!