A lot of the Robo-One robots are starting to make little two-servo “boxes” for the joints. The best example of this is OmniZero, which is made up almost entirely of these (plus straight connecting brackets):
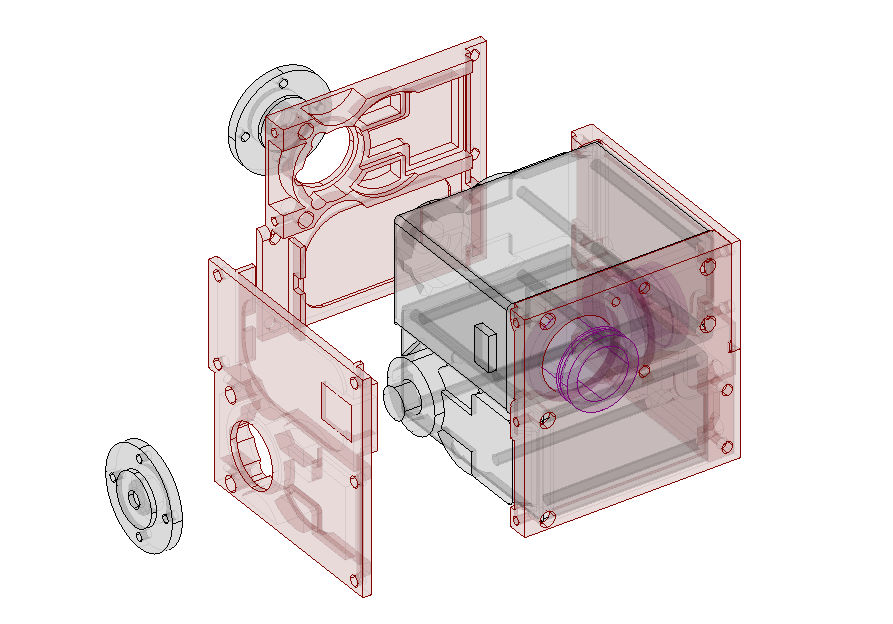
Each of the boxes in this design contains two servos. The knees have two servos on the same axis, just to double the speed and strength of that joint. But all the others are two-axis joints. The very same box can be used for ankle, hip, and shoulder, just by putting them in the proper orientation. (For the curious, here’s a CAD drawing of how these boxes are made.)
I find these two-servo boxes wonderfully elegant; they very neatly encapsulate the common need for a two-axis joint. SES doesn’t seem to have anything quite this elegant; our bots really have two one-axis joints joined end-to-end for the ankles, hips, and shoulders.
So, let’s unleash some ingenuity here. Can anyone come up with a single SES-compatible bracket that would securely and compactly hold two servos, on different axes?
Yes, these two servo boxes are really neat. Is that two servos at right angles to each other? I am wondering if something a bit more generalized could be made where two servos could be boxed in different configurations within the same form factor.
It might be easier to make a box from two different parts that also might be usable by themselves for different things. Maybe not a box exactly, but two brackets that could be put together in different ways in a box form factor. It would not necessarily have to be a totally enclosed box other than for looks.
I’ll work on it and see what I can come up with. I don’t like the way their drawing is representing the concept. It looks as though you would have to modify the servo case to begin with. The other thing is there is no room for a change in the servo case itself. If next year Hitec changes the top slightly for a gear mod that is better, your stuck.
So design should be based around using the existing servo mounts which also makes the unit more modular when it comes to servos.
That’s right. (Except for the knees, but I’m less concerned about those, since two servos at the same orientation is pretty trivial to make yourself.)
Well, you see, there are only two configurations — servos in the same plane (like the knees), and servos in different planes (like the ankles, hips, and shoulders). All the different-plane boxes are just rotations of each other. The same-plane configuration is easy, but the different-plane configuration is not, so this is where I think a new SES bracket would really be helpful.
Agreed; I wasn’t suggesting for a box per se, just a bracket that holds two servos at right angles to each other. It’s the function of these boxes I’m after, not necessarily the appearance.
OmniZero isn’t using standard hobby servos. I agree, we don’t want something that restrictive.
Right; no need to completely surround the servos. I imagine it would look a lot like two multi-purpose brackets stacked on top of one another, with one of them rotated by 90 degrees with respect to the other.
The asb-04 will work for this joint. Had to look at the existing parts to be sure as I thought there was a pretty endless possibility when putting them together. http://www.psychocutter-rc.com/images/2axis.jpg
Excellent research and work! I was thinking the same thing might be possible, but just had not gotten around to looking into it. I’ve been all absorbed in working on Walter, my rover bot.
It’s nice to have an example of how truely versatile the SES really is.
Thanks! It’s not quite the same, in that it doesn’t allow the foot attachment (taking the ankle as an example) to be the upper servo, with the leg attaching to the lower servo (as you can see in the OmniZero rendering above). But now that I think about it, that would really require nonstandard parts, and result in a pretty fat robot, because standard servos are so much wider than they are deep. I don’t know whether there’s any real advantage to that arrangement anyway, or whether it’s just fashion.
Of the ASB-04 solutions, the modified one seems better at keeping everything in line.
I still suspect a custom bracket could do the job more elegantly, but this isn’t too bad. On my next bot, I’ll give it a try!



{kind=link}