

Intro:
This robot is build from the need for robotics on the go! It is small, compact and simple, while being functional enough to provide weeks of tinkering on the go! It actually is divided into 2 parts: the actual robot, and a pack of electronics for expansion. This page should outline what I do over a 16 days + any other fun things I do afterwards.
Day 1:
This is the first day. After endless time in a plane, I can now get to work. For now, I can only introduce Stubby.
- Controllers: Arduino Mega 2560 + Rapberry Pi B

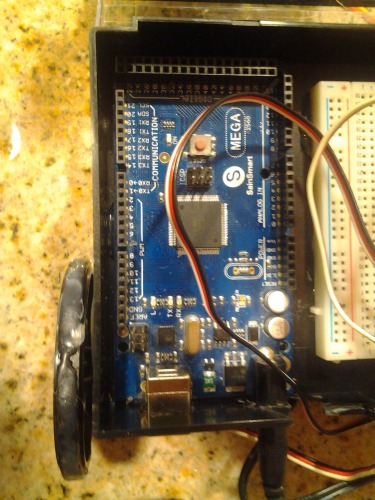
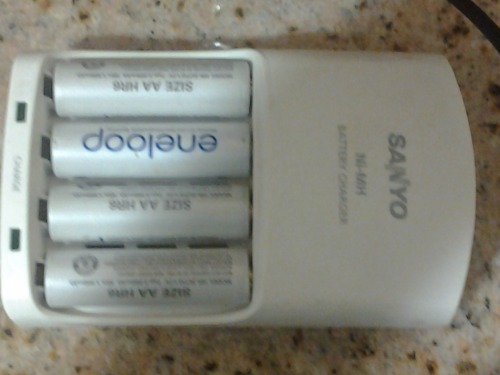
- Power: four rechargable AA batteries (2 Ah) + any usb battery pack
- Locomotion: two Parallax Continous Rotation Servos with salvaged Boe Bot hardware

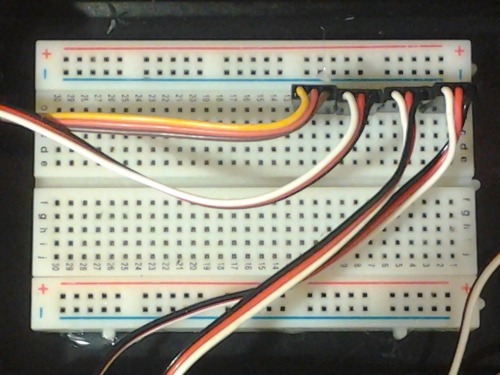
- Prototyping: half size breadboard
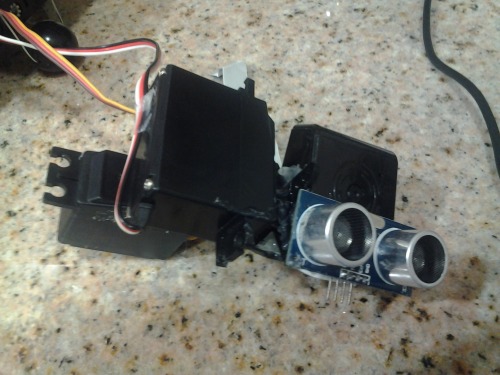
- Head: pan/tilt servos; Rasp Pi Camera; HC-SR04 Ultrasonic
- Extras: resistors, capacitors, LOTS of wires, peizos, 8Ω speaker, earphone, 7805 regulator, IR sensors, LDRs, relays, OLED display, RGB LEDs, 8x8 LED matrix, switches/buttons/joystick/dial, heartrate sensor, Wifi dongle, etc

Unfortunately, the head fell of in my bag. Another job for duct tape! I can see the potential, and am excited to get started.
Allow me to build on the go
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/stubby-the-travel-bot-kit