This is "Stomper", a 3-servo walking robot I built a few years ago from plans in Karl Williams "Insectronics" book. I've resurrected him from my robot junk pile to be my first robot posted here. He wanders about making noise until he runs out of battery power or we get tired of him stomping about frightening the cat or one of our dogs. He uses an SRF04 ultrasonic ranger to "map" the space in front of him and avoid obstacles.
Since several here are asking a bit more information. Here's another go... :-) I've attached a few more photo's and a bit more description for those that who are interested in the mechanical details.
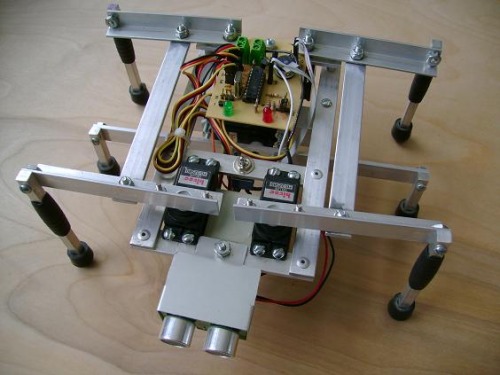
Top view
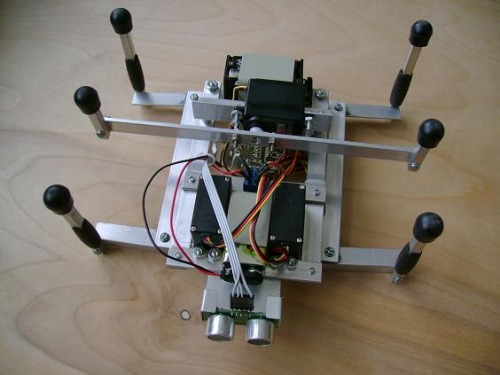
Bottom view
Here is a link to the "Insectronics" book on Amazon, you might be able to find a copy at your local booksellers as well. If you want to build one, be forewarned this isn't exactly a beginning project! You will need to make pc board if you follow the directions in the book. You will also need a Pic programmer to program the PICmicro 16F84A. I built my programmer from another book - the "el-cheapo programmer" from "Programming and Customizing PICmicrontrollers" by Myke Predko.
The software demonstrated in the YouTube video is straight out of the Insectronics book, this link: minimap.bas will show you the code I used. You could also use room-mapping.bas for nearly identical behavior - though a bit more open to some fun hacking!
If you are good with translating code, it should be easily adaptable to a BASIC Stamp or PicAxe (that is so popular here). Since the pc board is very close to the same size as an Arduino I am tempted to convert to that (maybe I will sometime, hmmm).
Stomper is built of hobby aluminum I found at my local hardware store, as well as the little rubber bumpers I used for the feet. You will need some basic metalworking tools to build the body - a hacksaw, a drill, a tape-measure, and a screwdriver should do it. The book assembles him with small bolts, I used pop-rivets on the non-moving frame parts, bolts and lockwashers elsewhere. I also put a dab of superglue in the leg joints as the bolts loosened from walking.
In case anyone wants to know Stomper is about 21cm x 20cm, stands about 10cm tall (~ 8.5" x 8", 4" tall)
Hi Oddbot - I can’t take credit for the software used in Stomper for this video! I played around a bit the code after I originally constructed Stomper, but then he sat for awhile in my robot “junkbox” for a couple years before I re-built him. The pic had been re-used for something else. So for the video, I gave Stomper a new pic and reloaded it with some code right out of the Insectronics book.
Lucky for you(!) the code file I used for the video is available from the book authors site - http://www.thinkbotics.com/mini-map.bas No doubt you will find some other interesting source files in the website as well! The algorithm itself is actually pretty simple! Stomper stops occassionally after travelling forward a bit and then turns around taking 11 distance measurements while putting the distance and heading values into a couple variables. The variable pairs with shorter distances are discarded. Stomper then turns to the heading with the highest range value and takes off stomping again. What’s nice about this algorithm is it is very simple and can be adapted to almost any kind of robot. You can also stuff the values into arrays and can do things like choose some intermediate distances you want him to go to.
Mr. M - Yep, metal! He is constructed from ordinary hardware store aluminum stock (hobby metal). Nothing special! Just cut to length, drilled, and bolted together. I used pop-rivets on the frame pieces, but for the legs I used bolts and super-glue as there is some tendency for the leg parts to loosen from the stress of movement. I guess I should take/post another photo from above to better show off the construction!
Stomper lives on! I had forgotten how much fun he is to have around and to demonstrate with…
As he says he copied it from As he says he copied it from "Karl Williams "Insectronics" book" I would look there for plans and details on how to build and code.
sonar ranger too near to the floor? When I saw this design, I wondered about it too. The centerline for the ranger is about 5.5cm from the floor. But the near proximity to the floor does not seem to be much of a problem in practice. Stomper reacts to objects within 1/2 meter. Much closer and he turns or backs away.
i have build a similar hexapod but it’s not as nearly moving so fast
have you any explanation for it
i took out all pauses in teh program up to teh point that the servo’s were working anymore as the were moving in one direction while the program already told them differently