We’re considering trying to put together our first robot using a Wild Thumper 6wd chassis; that should allow us to use it indoors and out. The 75:1 option looks best since we would rather have power than speed. We’re trying to put together a basic robot and then we’ll end up add more sensors, etc., to it (maybe a Raspberry PI to do some serious vision, AI, etc. The first step is to get the right combination of parts so that we can get outr feet wet. If I’m understanding things correctly we’ll need the chassis, a controller board and a battery pack of some sort.
o At one time they suggested a T-Rex board to handle motor controlling and basic Arduino capability. Is that still the way to go?
o What sort of battery pack will work best given the power requirements of the WT as well as the space available?
o Does the WT come with motor/wheel encoders of some sort? It seems like it would be handy to know how far the robot has travelled, especially until we get some higher-level sensing capability (which may be a while)?
o Any other basic things we should consider?
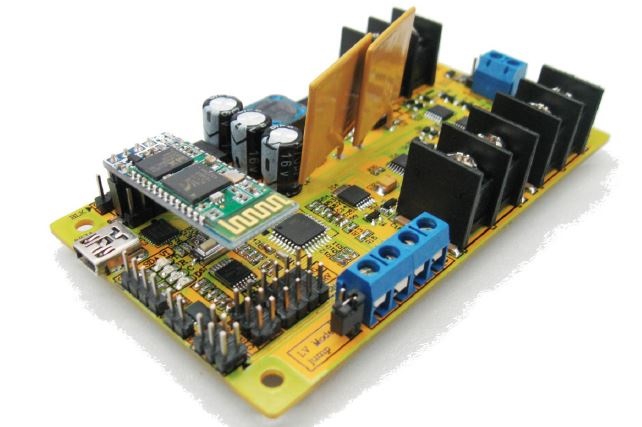
Is there a BlueTooth plugin for the T-Rex?
Hi,
Yes, you can use the Dagu Bluetooth Module with the T-Rex : robotshop.com/en/dagu-bluetooth-module.html
There is a sample code in the documentation of the T-Rex to use a Bluetooth Module : robotshop.com/media/files/zi … -12075.zip
Regards,
Will the T-Rex card do the charging for the batteries mentioned above or do I need something else?
Hi,
The T-Rex Motor Controller doesn’t include a battery charger circuit. You may need an external NiMh battery charger to charge your batteries like this one for example : robotshop.com/en/nimh-nicd-s … -1025.html
It’s recommended to disconnect the battery packs from the T-Rex while charging them.
Regards,
I am new to robotics and have just started with the following setup:
Robot
Wild Thumper Chassis
T-Rex Motor Controller
Raspberry Pi 2 (controlling T-Rex over i2c)
Base Station
Logitech Extreme 3D Pro
Raspberry Pi B or Laptop (talking to Pi 2 probably using ROS)
I have currently got the Pi 2 -> i2c -> T-Rex working on the desk.
Next step is to move this to WT chassis and start working on the ROS code


