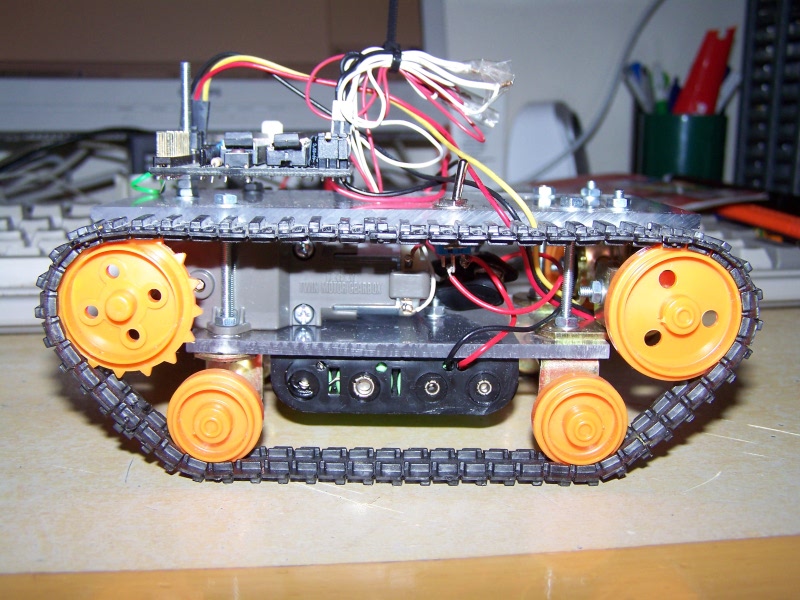
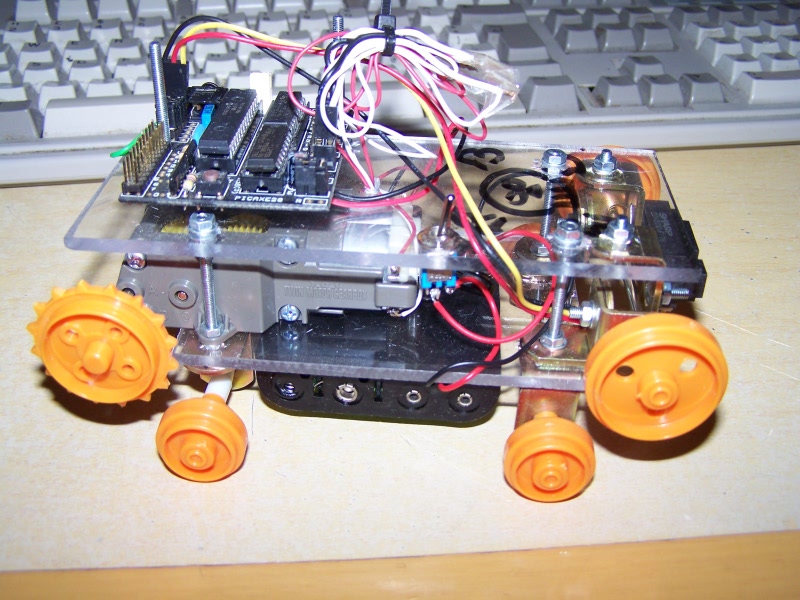
This is a simple tracked robot, based mostly on standard entry level components: picaxe, sharp sensors, l293d driver, tamiya motors. I'm mainly reusing them from my first robot, apart from the motors.
The chassis is made by two custom hand-sawed "plastic glass" sheet, distantiated by long screw. I used a lot of L-shaped components to secure the wheel axels and the sensor. The final structure is rock-solid.
This time i also added a switch. I was tired of connecting and disconnecting the "9V like" connector. If anyone is in my situation, i can guarantee: it's worth the effort :)
So sorry if this is yet another standard design robot, i'll try and make something more interesting asap :)
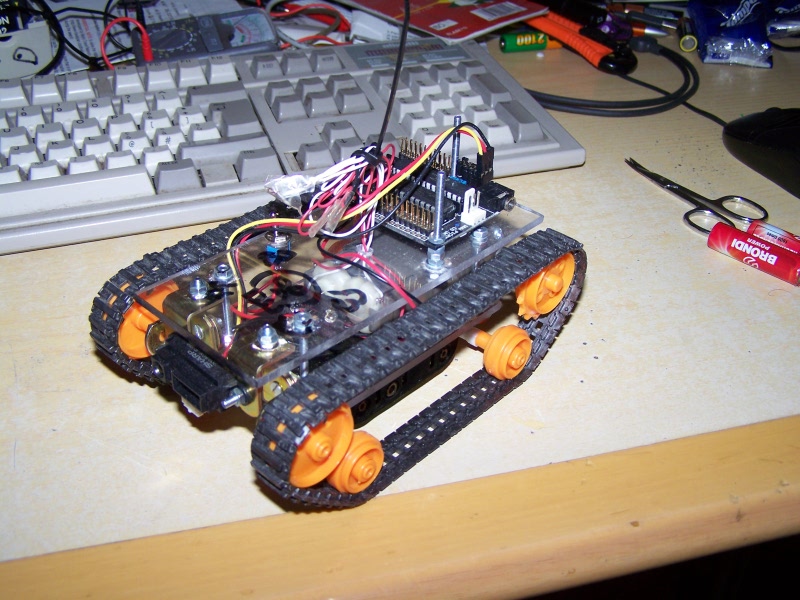
As suggested in the comments, i decided to add another distance sensor. This will he hosted higher, so that the robot can tell if the obstacle is high or low. If it's low, the tank will of course use the his mighty powerful tracks to climb over it :) If it's high, it will use the servo to search for an "exit" and go that direction.
Actually i don't have a spare Sharp sensor, so i just mounted the servo. It fitted perfectly between the mounting of the original sensor, just in front of the motors.
I see a tank! Awsome! great forward thinking with the power switch. You have built a First class robot. Now you should go beat up bully bot. just a thought.
a pirate bot ? i really a pirate bot ? i really like the chassis you made, it looks well made and i really would like to have something similar for my bot. What tools did you use for the cutting?
i used a plain old saw… no fancy laser cutting here i drawed the lines with a maker and a try square and followed them
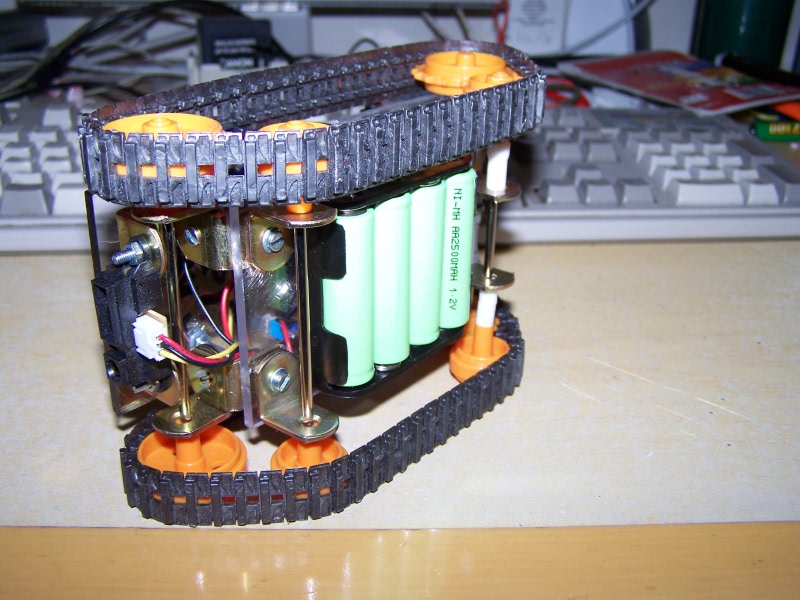
The sheet of plastic glass was about 25x50 cm, 4 mm thick. I sawed a a strip of 6,5 cm and then cut in two to make the two decks. For the holes i used a hand drill, all bolts are 3 mm, of various length.
The sintetic glass had a label that said: “you can saw it, you can drill it, you can hot-bend it, etc”, and indeed the sawing was clean, no debris or erosion or cracks, i just sanded the edges slighly and it was ready. It’s also very very transparent, almost like real glass.
I also fully agree about adding switch(s). I’ve put 2 switches on my project. One is to turn on the power to the PICAXE board, and sensors, and the other is for the servos. Depending on what I’m doing, I sometimes want the PICAXE and sensors powered up, but not the servos.
(I’m using continuous rotation modified servos for locomotion).
The switches I’m using are Minatronics micro toggle switches, which are small, but finger friendly.
ANY switch is faster and easier than dealing with an awkward connector.
Loool, you’re right The thruth is that the videos were taken when i still had to mount the sensor, so it did just run forward and nothing else It was to demonstrate its climbing abilities!
Maybe i’ll take another video of the robot avoiding obstacles
I don’t think so. It goes I don’t think so. It goes over the stack of books in the video, because they are arranged like stairs, where each step is relatively low. What if the books were stacked, so the robot hit a wall? Would it climb over them?
Sure, the bot can easily climb vertical wall, thanks to some sticky paste i used on the tracks.
Ok, just joking it doesn’t climb walls. Anyway the idea still apply becouse the sensor is low enought now to sense very short obstacles. Making it some centimeters higher should avoid sensing short steps
How about using two distance sensors. Leave the one that you have mounted on the front and then add another one above the level of the treads. If the lower sensor sees an object, it checks to see if the upper sensor sees it too. If they both see it the object is too tall and the robot avoids it. If only the lower sensor sees it the robot attempts to climb. If only the upper sensor sees it, the robot avoids because it is a low hanging object. A tilt sensor might also be a good idea. If the angle exceeds a certain degree have the robot reverse until it recieves a level reading then turn 90° and continue on its way.
Guess I should keep this to myself until I do it so nobody will steal my idea and forget to give me credit, but if we don’t share our knowledge and ideas how will we spread this wonderful hobby?


 ? i really
? i really i drawed the lines with a maker and a try square and followed them
i drawed the lines with a maker and a try square and followed them 