



Standard Tracked Robot
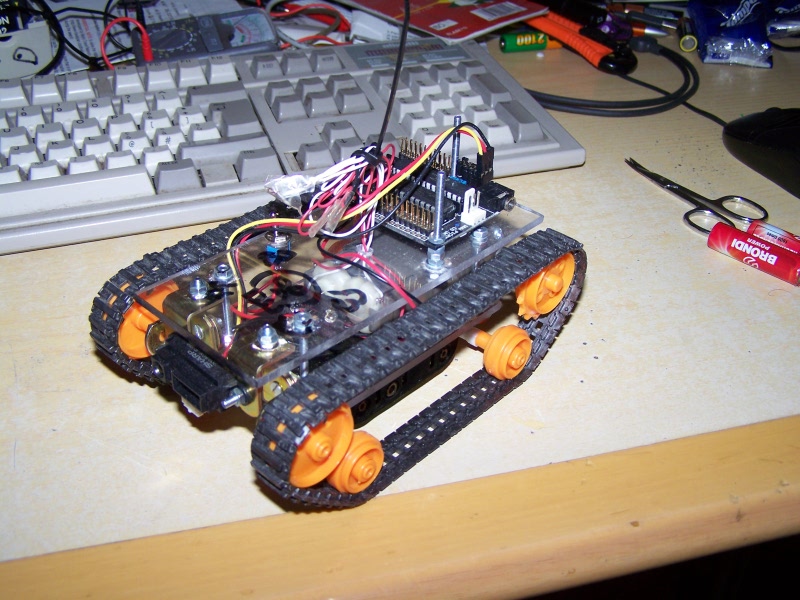
This is a simple tracked robot, based mostly on standard entry level components: picaxe, sharp sensors, l293d driver, tamiya motors. I'm mainly reusing them from my first robot, apart from the motors.
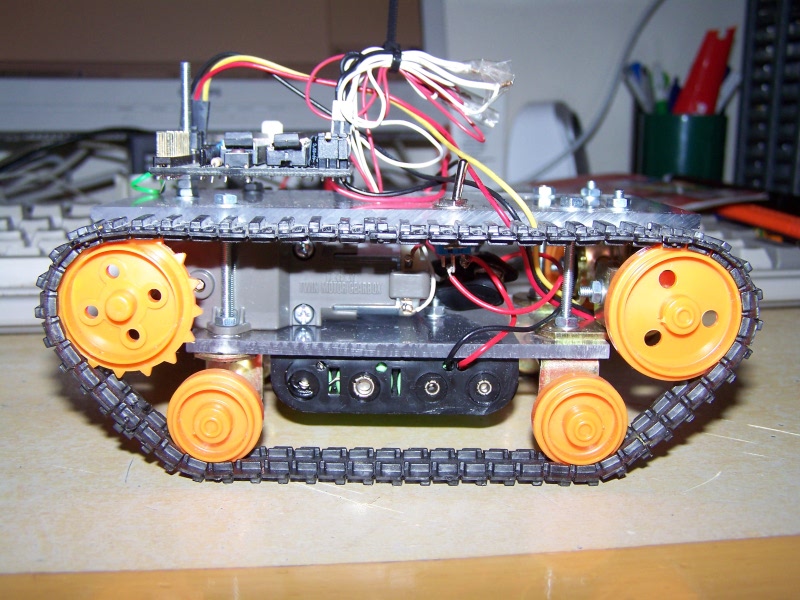
The chassis is made by two custom hand-sawed "plastic glass" sheet, distantiated by long screw. I used a lot of L-shaped components to secure the wheel axels and the sensor. The final structure is rock-solid.
This time i also added a switch. I was tired of connecting and disconnecting the "9V like" connector. If anyone is in my situation, i can guarantee: it's worth the effort :)
So sorry if this is yet another standard design robot, i'll try and make something more interesting asap :)
Pictures and videos:
UPDATE 11/09/2008
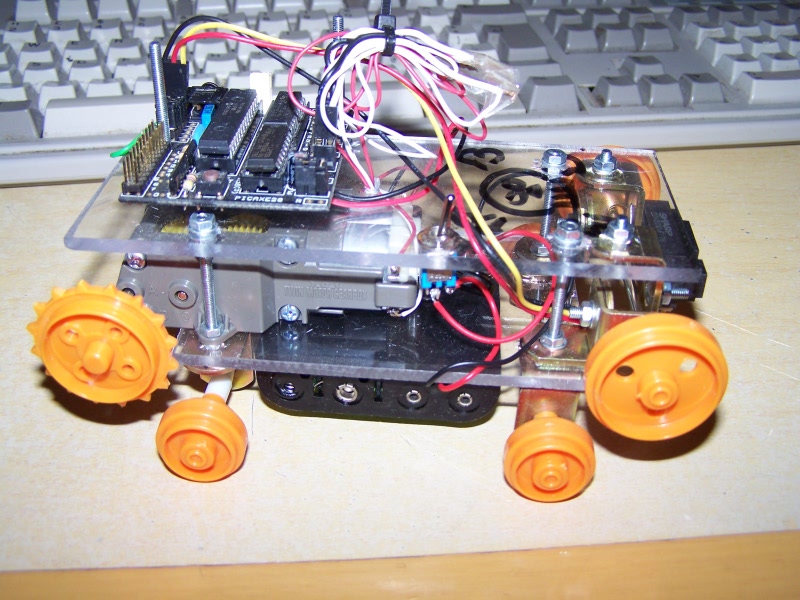
As suggested in the comments, i decided to add another distance sensor. This will he hosted higher, so that the robot can tell if the obstacle is high or low. If it's low, the tank will of course use the his mighty powerful tracks to climb over it :) If it's high, it will use the servo to search for an "exit" and go that direction.
Actually i don't have a spare Sharp sensor, so i just mounted the servo. It fitted perfectly between the mounting of the original sensor, just in front of the motors.
Here's some pictures :)
Goes around avoiding obstacles
- Actuators / output devices: Tamiya twin gearbox
- CPU: Picaxe 28x1
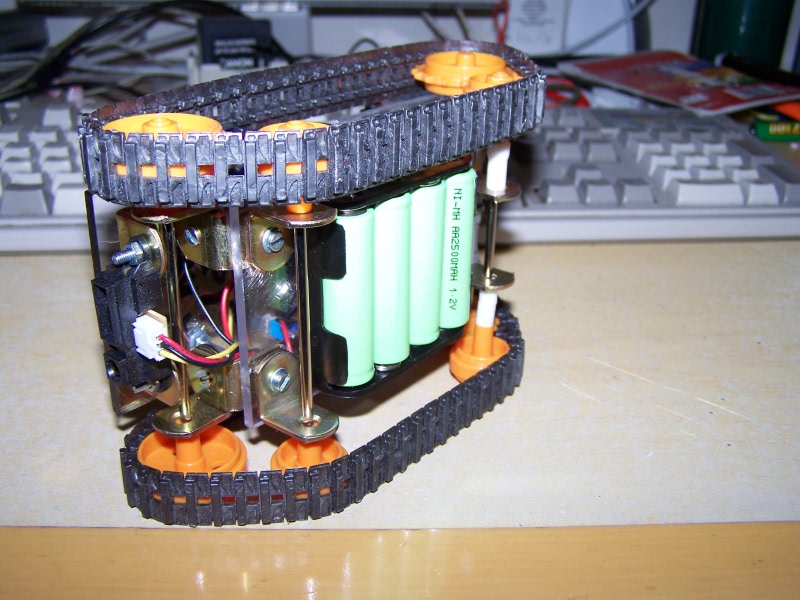
- Power source: 4 AA batteries
- Programming language: Basic
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoor