

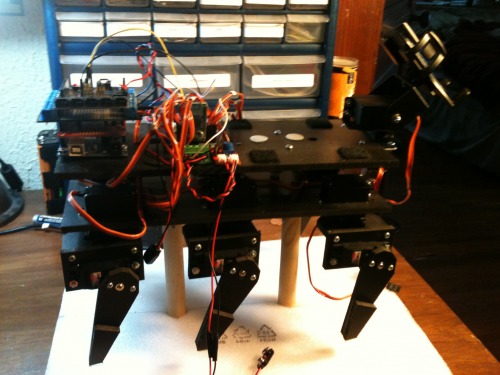
SpideyCAM is still a work in progress. He'll be remotely controlled via XBee radios from my laptop. I'm building the dashboard panel in Processing using a bunch of additional Processing libraries including OpenCV, ControlIO and ControlP5. This is my first experiment with this many servos. The Pololu Maestro software was invaluable for building the servo walking motion I've shown in the video. SpideyCAM still needs further work to get him to walk without falling over.
Here are some more pictures:
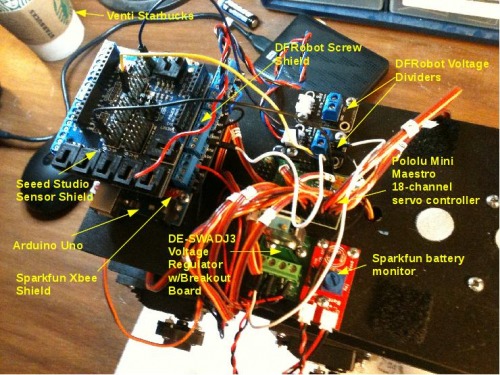
Some details of the various components:
-----UPDATE 2-6-2013-----
Added a video of SpideyCAM's first forward steps under his own power. Experimenting with timing between leg sweeps so that Spidey doesn't lose his balance.
12 servos for walking, 2 servos for cam sweep/pan
- Actuators / output devices: Power HD Standard Servo 6001HB servos for walking
- Control method: remote controlled via xbee
- CPU: arduino uno
- Operating system: Linux
- Power source: 8 1.2v Ni-MH 2500Mah (9.6v)
- Programming language: Arduino C++, Processing (java)
- Sensors / input devices: IPod Camera
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/spideycam