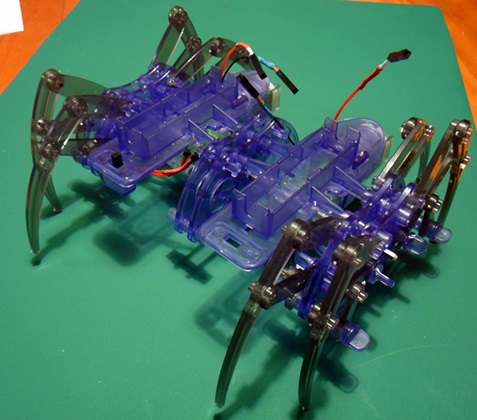
I have uploaded a short video, just to proove the concept. The spider walker works beautifully. Sorry about the video quality…
The robot is not fihished yet, because I could not make the sonar work with the 3.3V Launchpad panel. So maybe I will use an Arduino with the final version…
As for the sonar module, are you using level-shifting to connect to the launchap? also be sure to feed the sonar module itself with a stable 5V otherwise these cheap modules (HC-SR04) are known to provide unreliable results.








 Interesting idea, keep posting please!!!
Interesting idea, keep posting please!!!