

The main goal of this project was to test the speech recognition performance of BitVoicer (http://www.bitsophia.com/BitVoicer.aspx). For this purpose, I designed a simple led control sketch which I integrated with BitVoicer. Of course you can do anything you want once you have received the commands from Bitvoicer, but to keep things simple, I thought a led test would do just fine.
Here is the YouTube video with the results: http://www.youtube.com/watch?v=gs-3fJCa5P0
The Voice Schema used in this project can be downloaded from http://www.justbuss.xpg.com.br/BitVoicerTest.zip (you need to have BitVoicer installed in order to open it)
This is the Arduino sketch that controls the leds and retrieves data sent from BitVoicer:
//Includes the BitVoicer library to the sketch
#include <BitVoicer.h>
//Sets up the pins and default variables
int pinR = 3;
int pinY = 5;
int pinG = 6;
int blinkDelay = 250;
int sequenceDir = 0;
int lightLevel = 0;
//Creates a new instance of the BitVoicerSerial class and
//sets up serial port to 0
BitVoicerSerial bitVoicer = BitVoicerSerial(0);
void setup()
{
//Starts serial communication and sets up the pinModes
Serial.begin(9600);
pinMode(pinR, OUTPUT);
pinMode(pinY, OUTPUT);
pinMode(pinG, OUTPUT);
}
void loop()
{
//Retrieves data from serial buffer
bitVoicer.getData();
//Quits the loop if no string data was returned from getData
if (bitVoicer.strData == "")
{
return;
}
//Each of the next 'if' statements performs a different
//task based on the data received from BitVoicer
if (bitVoicer.strData == "wake")
{
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
delay(200);
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
delay(200);
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
delay(200);
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
delay(200);
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
delay(200);
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
bitVoicer.strData = "";
lightLevel = 0;
}
else if (bitVoicer.strData == "sleep")
{
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
delay(200);
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
delay(200);
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
delay(200);
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
bitVoicer.strData = "";
lightLevel = 0;
}
else if (bitVoicer.strData == "RH")
{
digitalWrite(pinR, HIGH);
bitVoicer.strData = "";
lightLevel = 255;
}
else if (bitVoicer.strData == "RL")
{
digitalWrite(pinR, LOW);
bitVoicer.strData = "";
lightLevel = 0;
}
else if (bitVoicer.strData == "YH")
{
digitalWrite(pinY, HIGH);
bitVoicer.strData = "";
lightLevel = 255;
}
else if (bitVoicer.strData == "YL")
{
digitalWrite(pinY, LOW);
bitVoicer.strData = "";
lightLevel = 0;
}
else if (bitVoicer.strData == "GH")
{
digitalWrite(pinG, HIGH);
bitVoicer.strData = "";
lightLevel = 255;
}
else if (bitVoicer.strData == "GL")
{
digitalWrite(pinG, LOW);
bitVoicer.strData = "";
lightLevel = 0;
}
else if (bitVoicer.strData == "blink")
{
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
delay(blinkDelay);
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
delay(blinkDelay);
lightLevel = 255;
}
else if (bitVoicer.strData == "BF")
{
blinkDelay = 100;
bitVoicer.strData = "blink";
lightLevel = 255;
}
else if (bitVoicer.strData == "BFF")
{
switch (blinkDelay)
{
case 500:
blinkDelay = 250;
break;
case 250:
blinkDelay = 100;
break;
default:
break;
}
bitVoicer.strData = "blink";
lightLevel = 255;
}
else if (bitVoicer.strData == "BS")
{
blinkDelay = 500;
bitVoicer.strData = "blink";
lightLevel = 255;
}
else if (bitVoicer.strData == "BSS")
{
switch (blinkDelay)
{
case 100:
blinkDelay = 250;
break;
case 250:
blinkDelay = 500;
break;
default:
break;
}
bitVoicer.strData = "blink";
lightLevel = 255;
}
else if (bitVoicer.strData == "sequence")
{
if (sequenceDir == 0)
{
digitalWrite(pinR, HIGH);
delay(250);
digitalWrite(pinR, LOW);
digitalWrite(pinY, HIGH);
delay(250);
digitalWrite(pinY, LOW);
digitalWrite(pinG, HIGH);
delay(250);
digitalWrite(pinG, LOW);
}
else
{
digitalWrite(pinG, HIGH);
delay(250);
digitalWrite(pinG, LOW);
digitalWrite(pinY, HIGH);
delay(250);
digitalWrite(pinY, LOW);
digitalWrite(pinR, HIGH);
delay(250);
digitalWrite(pinR, LOW);
}
lightLevel = 255;
}
else if (bitVoicer.strData == "revert")
{
if (sequenceDir == 0)
{
sequenceDir = 1;
}
else
{
sequenceDir = 0;
}
bitVoicer.strData = "sequence";
lightLevel = 255;
}
else if (bitVoicer.strData == "ALLON")
{
digitalWrite(pinR, HIGH);
digitalWrite(pinY, HIGH);
digitalWrite(pinG, HIGH);
bitVoicer.strData = "";
lightLevel = 255;
}
else if (bitVoicer.strData == "ALLOFF")
{
digitalWrite(pinR, LOW);
digitalWrite(pinY, LOW);
digitalWrite(pinG, LOW);
bitVoicer.strData = "";
lightLevel = 0;
}
else if (bitVoicer.strData == "brighter")
{
if (lightLevel < 255)
{
lightLevel += 85;
analogWrite(pinR, lightLevel);
analogWrite(pinY, lightLevel);
analogWrite(pinG, lightLevel);
}
bitVoicer.strData = "";
}
else if (bitVoicer.strData == "darker")
{
if (lightLevel > 0)
{
lightLevel -= 85;
analogWrite(pinR, lightLevel);
analogWrite(pinY, lightLevel);
analogWrite(pinG, lightLevel);
}
bitVoicer.strData = "";
}
else
{
Serial.println("ERROR:" + bitVoicer.strData);
bitVoicer.strData = "";
}
}
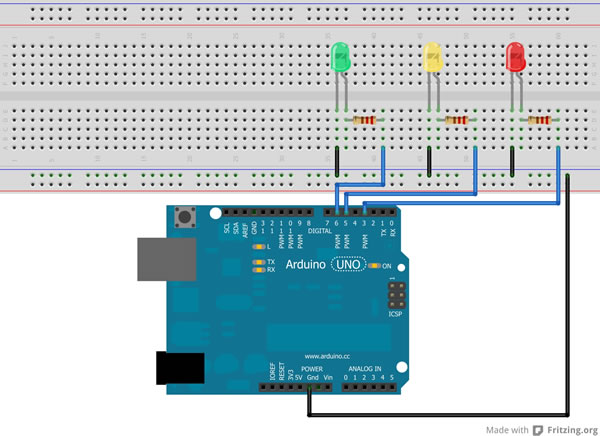
This is the basic layout of this project. I also added a couple of pictures of the connected wires bellow the layout.

https://www.youtube.com/watch?v=gs-3fJCa5P0?version=3
