noise0
March 3, 2009, 4:17pm
1
it's the ultimate solar rover
based on Picaxe 18X
it soaks only 25 uA in idle mode
it have a brain
it's i/o modular through 2.5mm strips
it's efficient
it's small (L:66m W:37mm)
the nemesis of beam robots
asd
navigate
Actuators / output devices: two motors + modular
Control method: autonomous
CPU: picaxe 18x
Power source: Solarbotic SCC3766 solar-cell
Sensors / input devices: modular
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/somimoro
noise0
March 3, 2009, 5:09pm
2
i need some advice about the
i need some advice about the drive train
now i have put those two motors and the big belly capacitor
noise0
March 3, 2009, 5:44pm
3
thank you for the
thank you for the advice
about the cap now it’s a bulk 6800 uF
and it provide enaught energy to drive both motors for 50 mS @ 3v
it’s enought ini order to move
bigger cap means longer motion period but longer idle time
anyway cap size have to be reduced
i was thinking about thread bealt
but i fear too mugh friction
icon
March 3, 2009, 11:42pm
4
what oddbot said, usually in
noise0
March 4, 2009, 6:39pm
5
yep that cap would be great
yep that cap would be great for this bot , 5,5v is ok
i have done some tests and it seems motor have enought torque to drive thread bealts…
now i am trying to handcraft a decent drivetrain
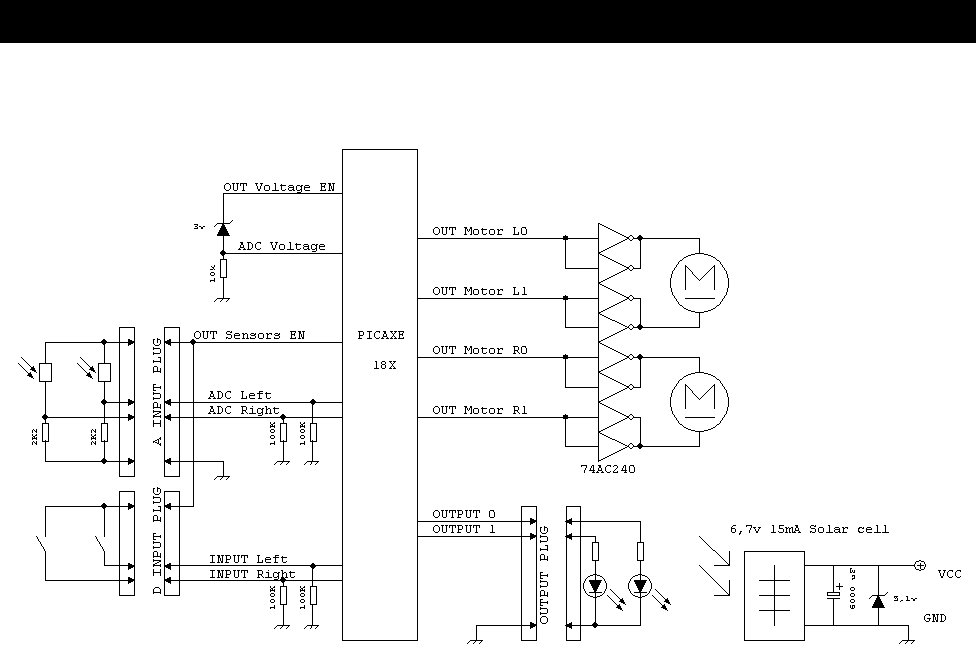
Schematic
This bot is awesome awesome awesome! You MUST post a schematic of the circuit for us.
[EDIT] Just saw that you did.
noise0
March 5, 2009, 3:07pm
7
i have uploaded last
i have uploaded last schematic
noise0
March 5, 2009, 3:19pm
8
1. 2. I have no
1. 2. I have no experience with picaxe output current capability, those gearmotors are rated to soak 180mA stalled. I do not know how can respond picaxe output at his level of current demand. Anyway in this aplication the size is not so critical. I will try to use your advice for the next robot: the 1 inch cubic bot
3. please be patient, my english is crap and i can not understand what you mean
4. agree, many backup caps do not provide enought current to drive motors. Now I am trying to fit a 6,3v electolitic cap . In the pic the cap is a 16v
noise0
March 18, 2009, 6:00pm
9
that’s it the Somimoro with
that’s it
the Somimoro with bigfoot drivetrain
it’s 40% less eficiet opposed to original lo-frictionsetup
anyway it’ acceptable and with this setup it can seriously rover the envirenment…or not?
TODO
develop more I/O modules (feelers, lights, buzzers, ir,…)
glue a piece of pvc to fix drivetrain mechanical stability
rik
March 18, 2009, 6:04pm
10
funny
That is so funny, how it’s starting to move and stops again immediately. But with a bit of patience it still gets there!
noise0
March 18, 2009, 6:21pm
11
yeah tis is a test made with
yeah tis is a test made with 100W light bulb
under direct sunlight i expect great activity
hey! can you tell me where
noise0
March 19, 2009, 4:25am
13
it’s a Solarbotic SCC3766
it’s a Solarbotic SCC3766 solar-cell
rated 6.7V @ 30mA
bought here in italy from a Solarbotic distributor