

Hi all robotic colleagues,
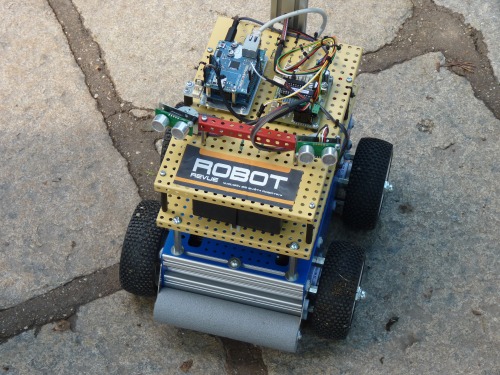
I built a robot in the competition "robot straight. The robots were to pass a 300m long straight track. My robot went under the compass. At the start, the robot is loaded the direction and under it went straight. The robot is built in cooperation with the firm Hobbyrobot.cz. Which delivered all the material for the construction of the robot. The robot is built on four-wheel chassis and the body of the robot is built from the Merkur. This will prevent the surrounding disturbed by electromagnetic field. The electronics consist of the main computational unit Arduino. On it is equipped with Ethernet Shield. At WiFi router communicates with the superior computer. The Arduino is also connected via the I2C on the PICAXE 28X2 and via serial bus on Sabertooth2X5. It is connected to a compass and to both ultrasonic sensors. Further information and photos'll gladly add soon.
Update: 27.5.
Two ultrasonic server to detect obstacles on the track. The robot just stopped when detect obstacles and waited until a clear path. Three electronics board are: blue are Arduino with Ethernet shield and board on right side is PICAXE 28X2 board. Communication between Arduino and PICAXE is over I2C bus. Approximately as follows: Arduino request the PICAXE for start mesuring the connected sensors (connected to the PICAXE). PICAXE start the measurement and the result stored in memory. Arduino wait a while for completion of measurements and then ask PICAXE for result. After that Arduino decide about robot next motion.
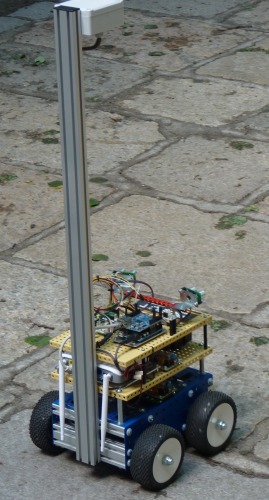
At the rear of the robot has a column with a compass. Also there is a WiFi router with two white antenns. Column is the same as a chassis made of aluminum profiles.
More information as soon.
Goes straight along the compass
- Actuators / output devices: 4x 67.5:1 ratio GM37-82rpm DC motors
- Control method: semi-autonomous or user-controlled over wifi.
- CPU: PICAXE 28X2, Arduino Duemilanove with processorATmega328
- Power source: 4x 12V Pb Battery
- Programming language: Picaxe basic, wiring
- Sensors / input devices: CMPS09 digital compass, SRF05 Ultra Sonic
- Target environment: indoor-outdoor (with good weather :)
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/snobot