

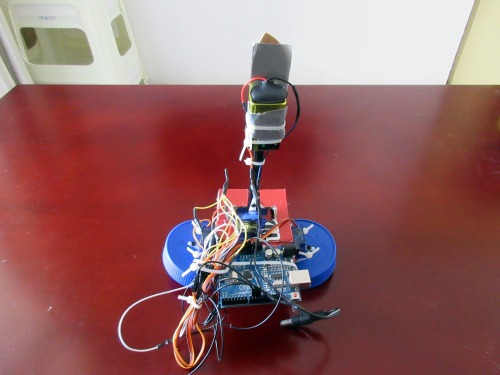
Skippybot named for its two Skippy peanut butter jar lid feet. I was motivated to build this by John W. Jameson's Gyro Walker but decided to use three servos instead of a gyroscope to make it move. I have since added sonar to it but am working through some false signals so am just posting its first walking steps.
Uses three microservos, Arduino Uno, 9 volt battery, 6 volt AAA battery pack, a cardboard body reinforced with some fishing pole sections and two Skippy caps.
Robot doesn't do a lot but its motion is a little entertaining. I could see someone doing a Silent Running drone (Huey - Duey - Luey) but I'm not much a model making. Gotta watch that movie again.
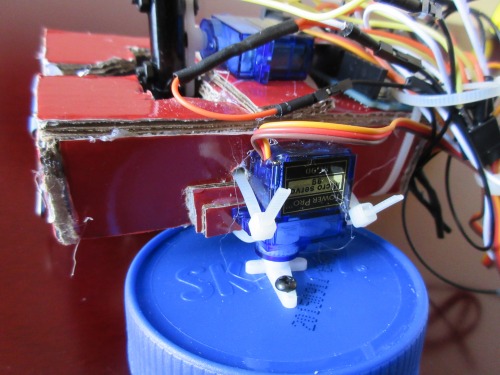
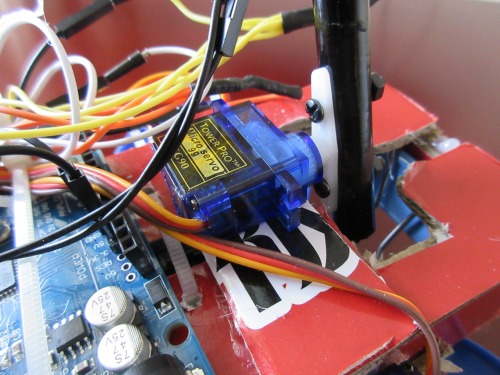
The feet servos are angled out from the body with a couple additional pieces of cardboard and
held onto the body with hotglue and 3 zip ties. (These photos don't show the third zip tie which
is lateral to hold the top of the servo to the body - since my hotglue came loose).
Servo swings neck counterweight (battery) back and forth.
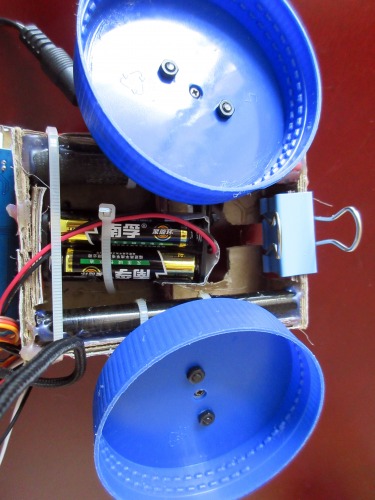
AAA battery pack suspended below body to keep center of gravity low. Also
added paper clip to act as front leg to keep robot from falling foward. Also can
use one on back side to keep from falling backward.
rotates on its feet and waddles side to side to move
- Actuators / output devices: 3 9g servos
- CPU: arduino uno
- Target environment: Smooth Surface
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/skippybot