

W.A.R --- Wandering Autonomous robot is a socially interactive robot which shows different behaviours under different circumstances. The main behaviour of this robot are:
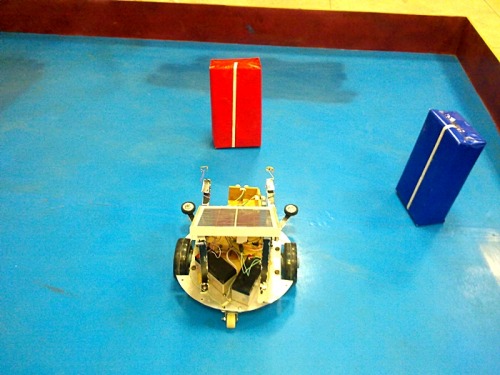
* Obstacle avoidance
* Light following
* Food seeking (Light source in this case)
* Prey & Predator behaviour
* S.O.C - State of charge monitoring
* Charging - through solar panel
1--- So here it is how its gonna work, initially when u gonna switch on this robot it will scan and mapp the arena with help of SONAR and servo then it starts wandering in the arena randomly while avoiding obstacles and walls of the arena. One good thing about this robot is that its very fast in its decision making as it does not stop and scan to decide which way to turn. Its mapping and scanning while its wandering.
2--It has 6 different movement and turning plans. It can move forward can also move backwards if the object is to near or a dynamic object start coming closer to it. It can take 90 degrees or 45 degrees turns on either side depending upon the position of the obstacle.
3--So while wandering its continously monitoring its state of charge to know its battery level which i have implemented using couple of resistances and voltage division rule. And measuring the voltege using analog pin of the arduino. Once that battery level drops below a point which i have set in programming. its priority changes and now it will start lookinf for its food which in my case is Light source.
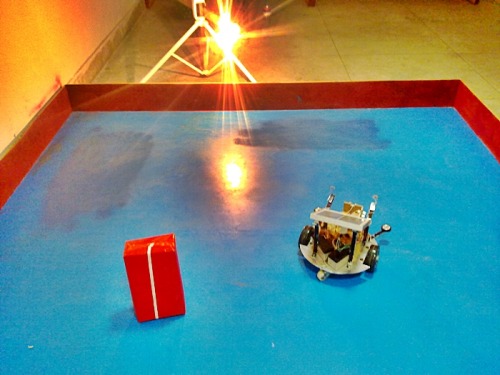
4--- It will move towards the Light source while avoiding obstacles. so its kindda tricky algorithm have to keep shifting the priority as if an obstacle came in its way while searching the light source now first it has to avoid that obstacle and then conitnue its search.
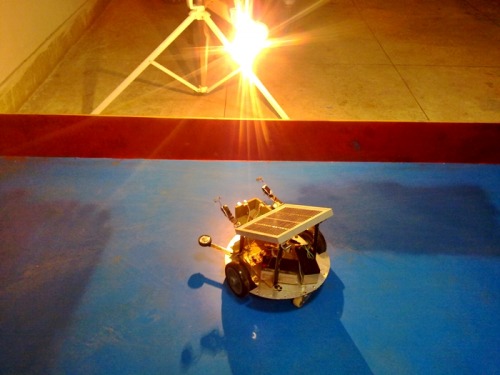
5-- Once its close to the light source where its getting the maximum amount of intensity on its LDR its stop there and charge itself through solar panel until its battery level is up again.
*The first video showing obstacle avoiding behaviour.
http://www.youtube.com/watch?v=O6hpfHQ-F2Y
*Second video Showing object following behaviour and prey & predator behaviour
http://www.youtube.com/watch?v=ORDur5Ghq50
* Third video showing Food seeking beahviour.
http://www.youtube.com/watch?v=5kR4vFLT3os
* Fourth behaviour showing dynamic light following behaviour in a dark room.
http://www.youtube.com/watch?v=hnBy_-RD5_Q
* Fifth video Showing Combination of two Behaviours Obstacle Avoidance + Food Seeking.
http://www.youtube.com/watch?v=D0uAAGxPiYg


Obstacle Avoidance, Light Seeking, Object Following, Light following, Charging through Solar panel
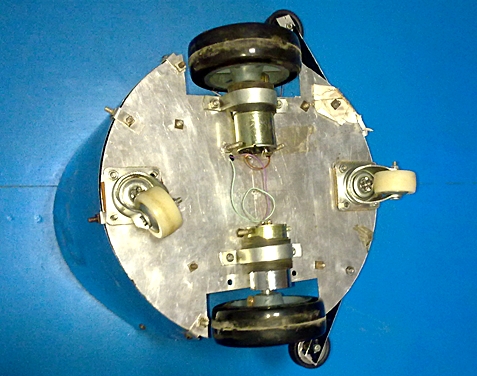
- Actuators / output devices: servo, 12v DC gear motors
- Control method: Autonomous.
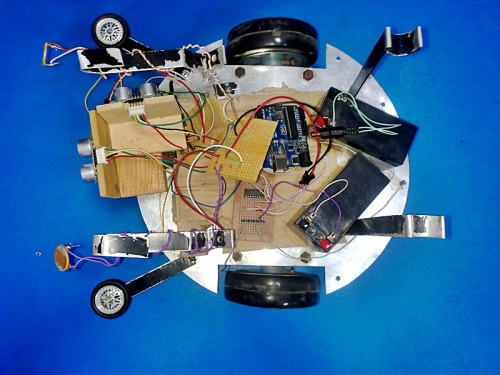
- CPU: Arduino
- Programming language: Arduino ide
- Sensors / input devices: IR, LDR, sonar, SRF04
- Target environment: Arena
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/six-behaviours-robot

