This is a simple three-servo hexapod robot using the Pololu Micro Maestro as a controller. The Micro Maestro allows allows me to sequence gaits and integrate sensor readings for obstacle avoidance.
I have posted complete build instructions and a video that I hope people will take a look at. Anyone who has decent soldering skills should be able to build this robot in an afternoon or so, and I think that there are a lot of possible variations on the design. Below I have posted some pictures taken from the build instructions to illustrate the steps in building the robot:
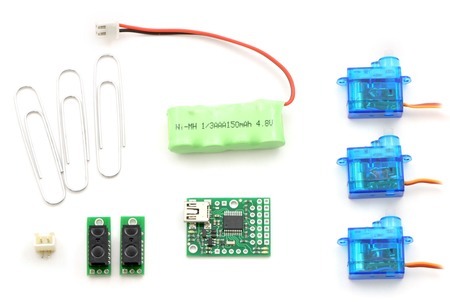
Parts used (total cost = $65):
Servo configuration:
Servo wiring to Micro Maestro:
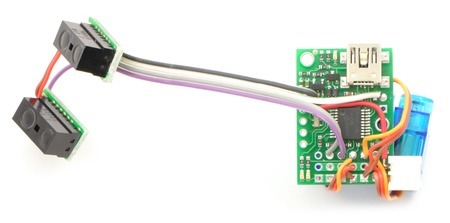
Sensor wiring:
Complete electronic assembly:
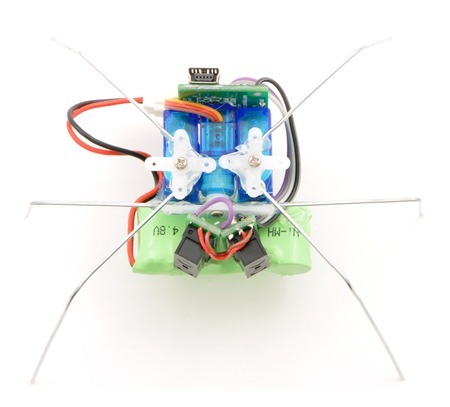
Complete robot assembly:
Walks forward and backward, turns in place, avoids obstacles.
Yes, it is quite capable of Yes, it is quite capable of lifting itself up, though it is obviously not going to be an all-terrain or outdoor robot. The servos do hum a bit when they are supporting weight.
First thing I want to say is amazing robot I might make this for my science fair in the category of working model. But the only problem is that this is a little small for my taste so what I want to say is can I full size servos with the micro meastro 6 channel. And can you give me any other options to somehow make it better, bigger and also can I make a hexapod with more servos using micro meastro 18 or 24 channel and how could or should I make it.
I forgot to ask you something else if I took the micro meastro 6 channel version assembled can I just plug in the servos with the connector instead of soldering and is there a better sensor I could use for this which is easy to assemble and if there is how should I program it I am bad at programming.