



Simple three-servo hexapod walker using the Pololu Micro Maestro
This is a simple three-servo hexapod robot using the Pololu Micro Maestro as a controller. The Micro Maestro allows allows me to sequence gaits and integrate sensor readings for obstacle avoidance.
I have posted complete build instructions and a video that I hope people will take a look at. Anyone who has decent soldering skills should be able to build this robot in an afternoon or so, and I think that there are a lot of possible variations on the design. Below I have posted some pictures taken from the build instructions to illustrate the steps in building the robot:
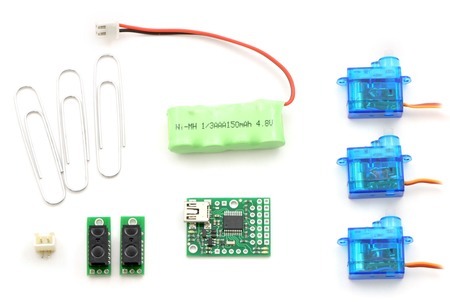
Parts used (total cost = $65):
Servo configuration:

Servo wiring to Micro Maestro:

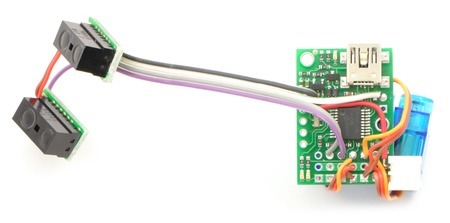
Sensor wiring:

Complete electronic assembly:
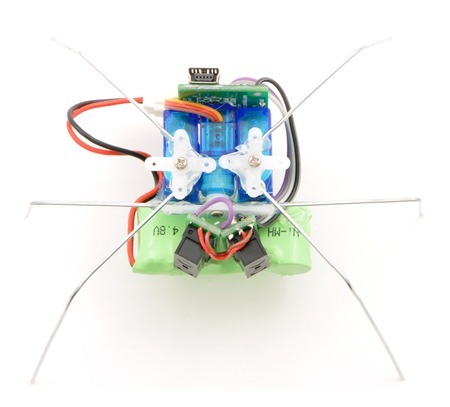
Complete robot assembly:
Walks forward and backward, turns in place, avoids obstacles.
- Actuators / output devices: 3 generic micro servos
- CPU: Pololu Micro Maestro Servo Controller
- Power source: 4.8V 150mAh NiMH pack
- Programming language: Maestro Scripting Language
- Sensors / input devices: Sharp GP2Y0D810
- Target environment: clean flat surfaces