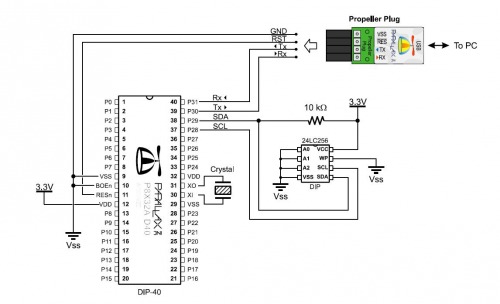
Hi im having trouble getting the propeller tool to recognise my breadboarded propeller chip. ive set the chip up according to the schematic below except the eeprom has been ommited. the propeller tool is telling me that nothing was found on the com ports
Edit::
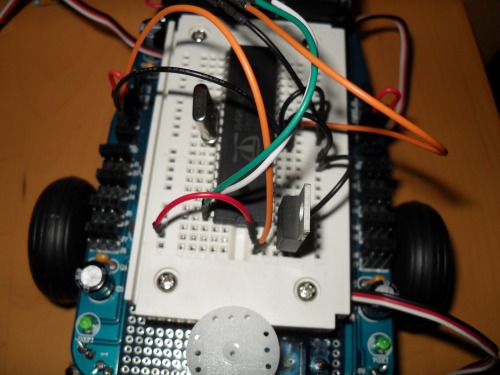
this is how the circuit is laid out on the bread board. the green and white wire go to the prop plug along with the reset and ground cable.
Edit :: Looked in the prop plugs com port settings in windows.
Right off the bat, I am not sure if the EEPROM is required for the chip to work in general, or if it is only needed for long-term program storage. Gotta check that.
From there, we just gotta do the checklist
power --the right voltage and enough current / good ground --this does not come from the USB
RX/TX switched? --Really easy to do
Double check that the computer and the spin editor have found the prop plug
Double check the programmer is no upside down
Make sure the chip is not upside down (not likely when wiring your own breadboard)
dont think the eeprom is required. the powers coming via a lm1117t 3.3v ldo regulator fed from mr generals 4 AA batteries. programmer and chip both orientated correctly. computer has installed the prop plug as a ftdi chip. the spin editor mentions scanning com port 6 but cant find anything. pictures to follow soon.
ive specified com port six in the preferences file but with the chip powered up and the plug connected the spin editor will not find the chip. i keep getting the same no propeller hardware found statement.
Your port is set to 300 bits per sec. Unless you are syncing your robot with a rotary phone with a suction-cup modem, this is going to be a bit slow…
I am not sure what rate the prop uses to sync, but I can bet it is pretty darn fast. Start playing with those bits-per-sec rates and see where you get. I would start with the faster ones and move to the slower ones during testing.