

Sending out a pulse with my parallax ping)) often causes my servo to inexpilcably jerk, jitter, stutter, or shake. Is this a common issue? How do i avoid this and why are they conflicting?
curious…doesn’t happen
curious…doesn’t happen with mine, but i have no idea on how to solve it
Mine did it with the ping
Mine did it with the ping until I added another 6v dc battery supply. Add another supply for the servo and it should solve your issues. Also, if you have or plan to add motors, make sure to put a snubber cap between the poles of each motor. Servo’s are super noisy and need their own ground rail. As a side note, don’t use the ground rail that the servo and motors use to ground the ping.
I do have a separate 9v
I do have a separate 9v batery for the servo. my motors are unplugged, so that eliminates that possibility.
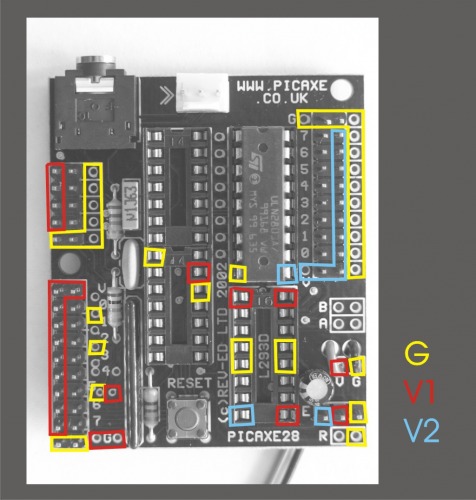
The sonar and IR are on the V2 line (5volts) and the motors/servo/buzzer on the V1 line (9volts).
i’m usinng the 28 pin project board (axe020) how do i put stuff on a separate ground rail? isnt there just 1 ground rail for the whole thing? like this(yellow)…
This is comon and general,
This is comon and general, has nothing to do with the Ping being a ping, it could just as well be SRF05.
I wrote about it somewhere, but here goes again 
As you may know, it is quite a feature that the picaxe can both handle up to 8 servos, and still do other stuff. Most other microcontrollers stop everything when they are moving a servo. So you could say that the little Picaxe is actually multitasking
However, when at the same time sending out pulses, sometimes the signals to the servos get a bumb here and there. And the servos react to this.
There is just one thing to do; insert little "pause 10" or 2 etc here and there. Sometimes just before the pulsout, sometimes just after a servo command etc. It does not always make sense, and there is no particular order that always works… but it works magic, so just try and find what works in the setup that you have at any given time
Ground and RC servo voltage
Just noticed something. The RC servos, ones used in RC airplanes and RC cars, generally are used at either 4.8 or 6 volts, not 9 volts. I know some over-volt them for higher torque, but it usually shortens the servos life, and might be causing the jitters seen.
Additionally, grounds should always be tied together, but sometimes only at one point. The reason being, there needs to be a reference point to measure voltages from, whether input or output. A single point connection prevents ground loops.
I’d say to add a cap, but
I’d say to add a cap, but now sure where you’d do that…it helped with my twitch issue…though it was also a 1k uf cap.
Woopaa… There is a new
Woopaa… There is a new version of the Picaxe editor out - they claim to have fixed a jitter-issue: A new command; "servopos" is implemented. I have not tried it, why dont you
From my own exp, servopos
From my own exp, servopos didn’t make a difference…could be different for your board though.