

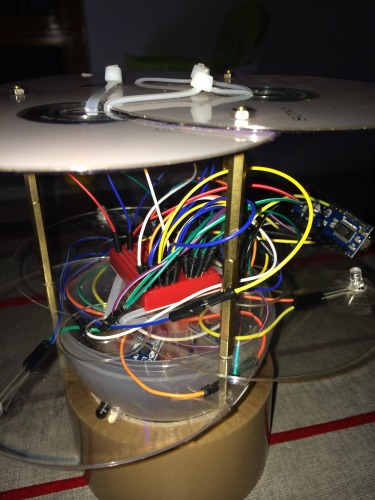
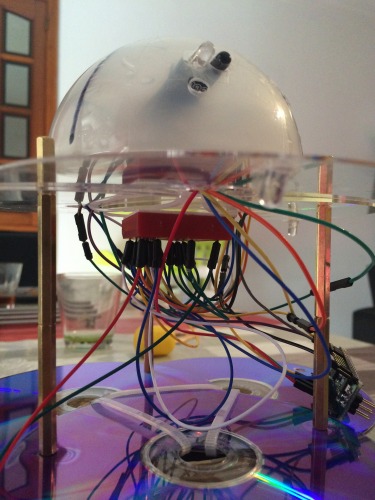
This is intended to be a Self Preservation Robot. The goal is to mimic some of the animal behaviour that we see in Nature when it comes to the self preservation instinct. The approach will be to mimic some self preservation mechanisms except, the fighting reflex. The robot will measure distance via IR sensors and when an object approaches less than 20cm, it will light an led, sounds an buzzer and finally run in the opposite direction of the obstacle detected. The led is intended to mimic the puffing behaviour of some animals, that pretend to be bigger and more impressive. Then the buzzer is intended to mimic the aggressive sound that some animals do like the rattle snake Finally the fleeing, the most common of the self preservation strategies in Nature, runaway before becoming someone's lunch :) This will also be an attempt I'm my first omni directional robot so it can flee immediately in any direction. As you can see it still needs some tuning in the angle of the wheels and the code could probably be improved. Hope you guys like it I enjoyed a lot making it.



Tries to emulate some animal behaviour regarding self preservation instincts
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/self-preservation-robot