

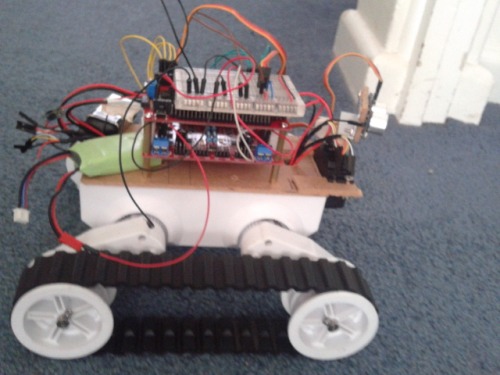
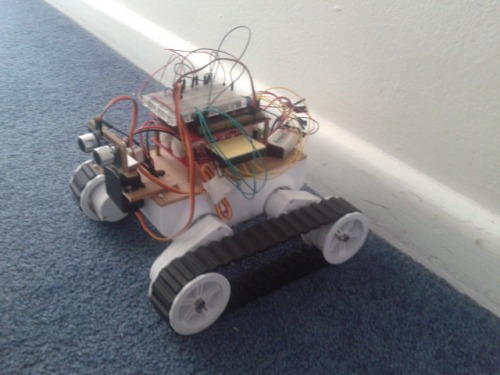
Here's my first robot that I’ve been working on lately.
At the moment it navigates via the Ping))) ultrasonic sensor. When it detects an object in front of it, it scans left and right and determines which direction is greater, then turns and travels in that direction (timing still rough).
The main purpose of this robot was to learn more about programming and electronics in general. I'm studying renewable energy engineering at uni, but a recent course project involving building a robot and using an Arduino got me really interested in robotics! If all goes well, i'd like to use it to perform particular tasks, like going underneath the house to set rat traps, moving objects from one room to another or even finding the best place throughout the day to position a solar panel in my yard!. I love building things and challenging myself, so it's been a great project for keeping myself busy during the uni break!
Things that still need to be added:
- I was originally using two Xbee's to debug the distance sweep process. Unfortunately for some reason, one of them is no longer working so I'm waiting on a replacement. I also wish to implement an override function so i can control it with my laptop or my other Arduino
- I'm also going to add some various IR Led's to cover any potential "blind" spots on the rover's chassis. I'd also like to implement an IR beacon system to get the robot to seek out IR light or return to a base.
- Another thing I'd like to add is a GPS module (if time and funds permit) that could provide a boundary for my robot such that it does not exceed a particular area or i could use it to return to robot to a base (instead of using an IR beacon).
- Finally, I’d also like to utilise the current sensors and rotary encoders on the motor controller to get more feedback from my robot and ultimately get it moving around autonomously without a hitch!
Hope you guys like it!
Navigate via ultrasound
- Actuators / output devices: one servo, 4 7.4V DC motors
- Control method: Autonomous and optional wireless xbee control
- CPU: Spider Robot Controller (ATmega1280)
- Power source: 9v battery for MCU and 7.4 LiPo for motors
- Sensors / input devices: PING))) Ultrasonic sensor
- Target environment: indoor, outdoor, Under the house
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/self-navigating-robot