

Update 16/05/14
Code and more pictures added.....had been a bit busy with exams :p.
Also ran a successful obstacle avoidance test with R2D2 sounds. :D
Hello LMR!!!
This is Scout...an obstacle avoider that can talk and log data (and make R2D2 sounds as well...I'll upload a video later!!) . I've built him using a 4mm thick acrylic plate (about 22cm X 21cm ) as a chassis (for now).
On to the electronics....I've used an Arduino Uno, a Wave shield giving it the speech capailities and an audio amplifier ckt for boosting the sound since I didn't get the volume I wanted using the wave shield alone (probably because I used an LM358 instead of the TS922s used in the original shield.)
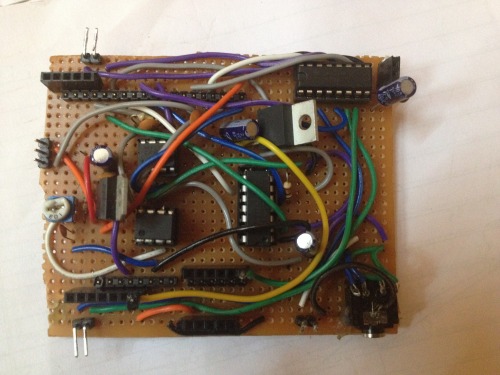
I started by soldering a wave shield using the adafruit scematic....only thing I changed was the opamp used (LM358 instead of the TS922). The only reason I did this was because the particular op-amp was really hard to find and would have probably stretched this project a few more days. Soldering the wave shield from scratch reduced the overall cost of the robot alot since the only part I ended up ordering was the DAC IC. I also added an L293d motor controller on to the same board in order to save space on the chassis.
The speaker I salvaged from a very old set of computer speakers that were not being used. (1/2W 8 ohm speaker)
The audio aplifier uses the LM386 op-amp (king of audio op-amps ?)....The sound coming from the wave shield alone wasn't as low as you'd think....the volume when using earphones was pretty neat...however it proved to be too low for any recording device to pick up when the speaker was used.Also I didnt use the exact capacitor values as shown in most schematics ( most use a 250uF cap...since theyre hard to find I used 2x100uf in parallel instead).Due to this the sound quality isn't exactly clear at low volumes and there is a slight crackling noise in the background.

The motors I ued were normal BO motors with three 0.1uF caps for noise cancellation....and used a 4xAA battery pack to power them.
For Obstacle avoidance I used a HCSR04 sensor and a servo for sweeping it left,right and centre...since the standard servo library couldn't be used because of a timer conflict with the wavehc library I had to resort to the ServoTimer2 library which uses microsecond inputs instead of an angle input.
I also added an RGB led behind the ultrasonic sensor so that it blinks while Scout talks....and also shows when he's friendly (blue) or angry (red). :p
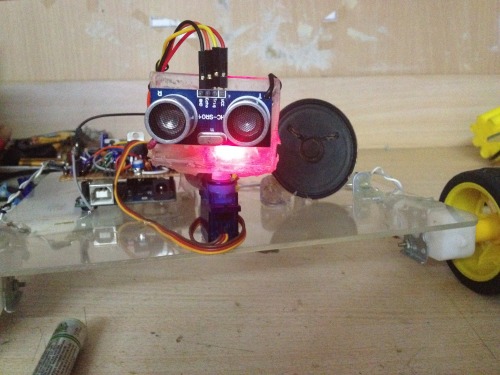
Here's a picture of the intended chassis :

Plans for the future :-
- Build/buy a permanent chassis. (a tank preferably)
- Shift all the speech capabilities to a RPi since it can play mp3 files (Converting every sound clip to a suitable wave file can be a pain.
- Add streaming video via webcam using the RPi.
- Controll the robot through a web browser.
- Add a Pan-Tilt head.
- Add a claw or two arms.
I will upload more pictures and videos in the coming days ! Cheers.
Navigate via Ultrasound,Log temperature
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/scout-v1-0


