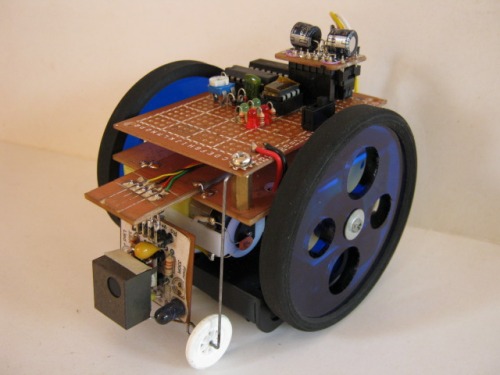
Hi all, My first post here. Currently posting one of my 3 robots. I will name this one 'sc00t3r', just scooting around in the room. :) wheels are from a laser cut acrylic board 5m thick, with rubber edges as its traction. gearmotors are generic clones.Sensor is from DPRG site named IR proximity sensor. It uses a 12C508/9 PIC chip, bunch of LEDs and a 38KHz IR sensor module(found on TVs/VCR). Control to motor is from a PIC12F675 -> PWM control -> motor drivers. Language used is Hitech C. Still new to this though so my code is pretty basic = basic movements! will keep updating this , so stay tuned. Thank you!
video uploaded (initial)
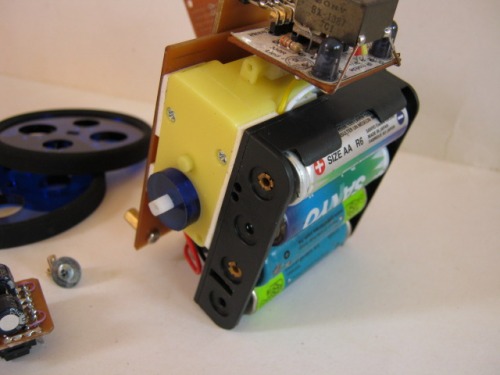
shown here with the idler wheel.. UGLY! :D next time im going upgrade that...
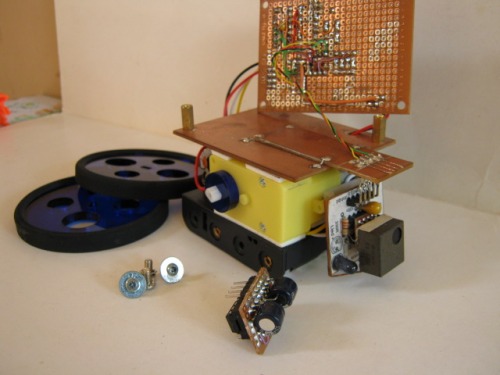
Wheels removed to show the gearmotor used. top board is the main board,lower right is the
modular board for motor drive. front shows the IR proximity sensor.
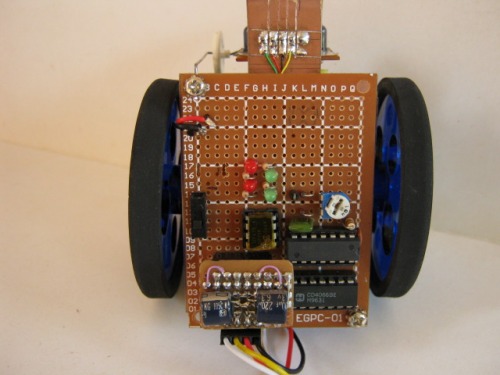
Top view of the main board showing the PIC, logic chips, LED indicators, trimpot (speed control, for PWM)
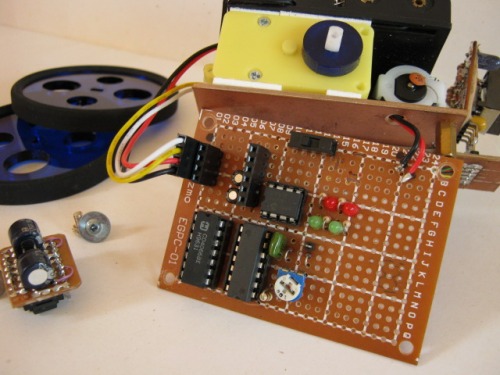
Another view of the main board, motor driver board removed..
HARDWARE UPDATE : march 26, 2012
==============================
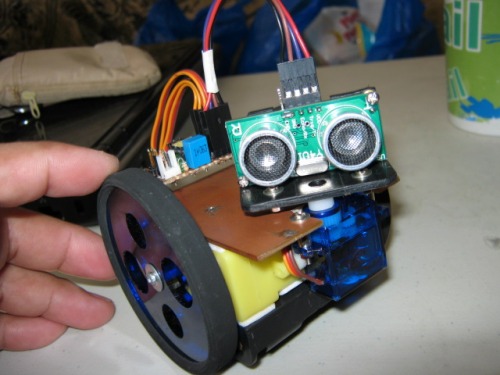
still using DC geared motors for locomotion but changed to piacxe 08M for the proccessor and an ultrasonic module for sensing..
side view..
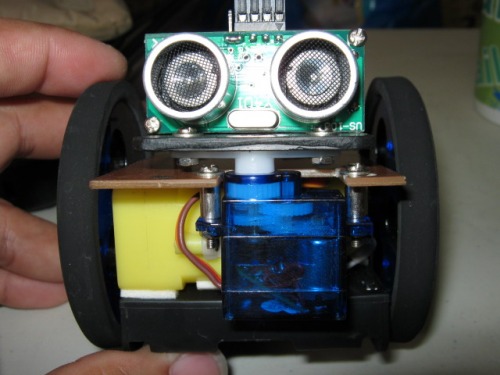
front view..shows how servo pan is mounted
now the picaxe board...and yeah its working now ... :-)
maybe I will just post THIS a new BOT entry? still learning picaxe basic syntax.. see ya!!
navigate autonomously indoors using IR proximity sensors
Actuators / output devices: Two 3V DAGU gearmotors
Control method: Full autonomous, IR proximity sensor
CPU: PIC12F675 & some logic chips
Power source: 4.8V Ni-Cd pack
Programming language: Hitech C
Sensors / input devices: IR proximity sensor (from DPRG site)
Target environment: rover, wheeled, IR sensor, PIC
hardware (Base) is I think? final… for the sensor/s, will be adding some soon… maybe some tactiles for ‘last resort’ sensing… and for the program, needs lot of tuning
and yeah, I love the wheels too basically, this hardware configuration is copied from LMR starter robot (I like bots w/c fit in the palm of your hand)…
well my purpose of that wheel was to keep the bot from “nose diving” often… w/c falsely triggered the IR proximity sensor… wheel diameter is kind-of large… so the bot swings a lot, like a see-saw when it moves forward/backward… I have a short clip here but I dont know if I could directly upload the file to LMR w/o storing it to youtube 1st… will try
Wow, that’s pretty cool. I Wow, that’s pretty cool. I hope that you can build it more and provide as many updates as possible. Building a robot that won’t run into things seems to be trick, so thanks for sharing.
Robot building is popular and probably will get more popular as time goes on because there is not a lot of people like Richard Green who are currently doing it.
Hi, thanks. currently its dismantled right now… thinking of using a servo + ultrasonic module for front navigation, and transfer that IR module at the back of the bot…




 basically, this hardware configuration is copied from LMR starter robot (I like bots w/c fit in the palm of your hand)…
basically, this hardware configuration is copied from LMR starter robot (I like bots w/c fit in the palm of your hand)…