


Sc00ter
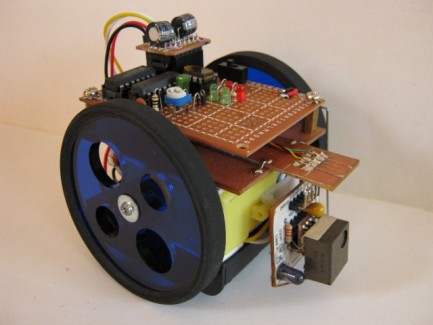
Hi all, My first post here. Currently posting one of my 3 robots. I will name this one 'sc00t3r', just scooting around in the room. :) wheels are from a laser cut acrylic board 5m thick, with rubber edges as its traction. gearmotors are generic clones.Sensor is from DPRG site named IR proximity sensor. It uses a 12C508/9 PIC chip, bunch of LEDs and a 38KHz IR sensor module(found on TVs/VCR). Control to motor is from a PIC12F675 -> PWM control -> motor drivers. Language used is Hitech C. Still new to this though so my code is pretty basic = basic movements! will keep updating this , so stay tuned. Thank you!
video uploaded (initial)
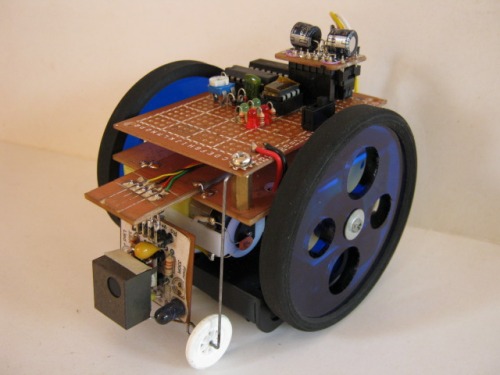
shown here with the idler wheel.. UGLY! :D next time im going upgrade that...
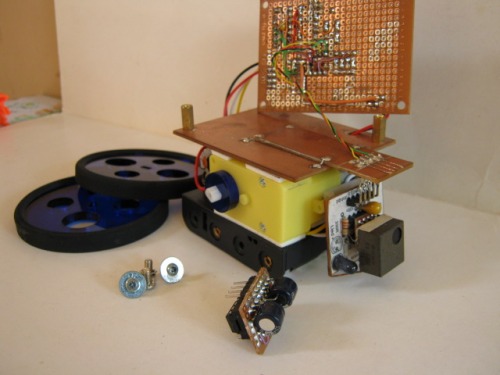
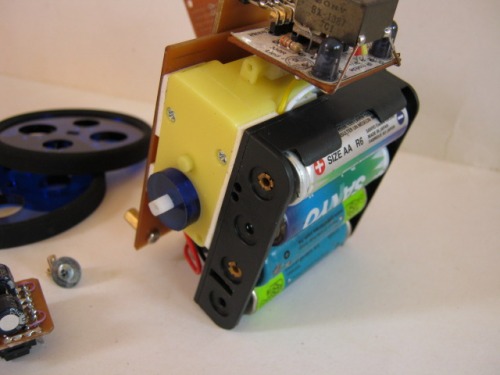
Wheels removed to show the gearmotor used. top board is the main board,lower right is the
modular board for motor drive. front shows the IR proximity sensor.
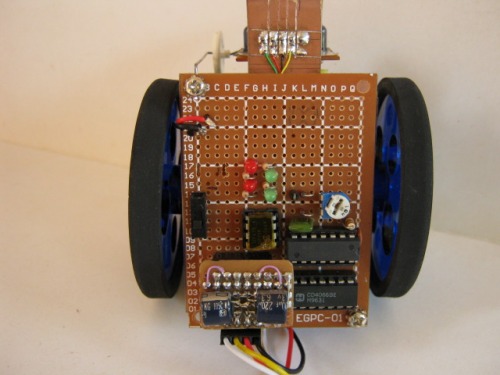
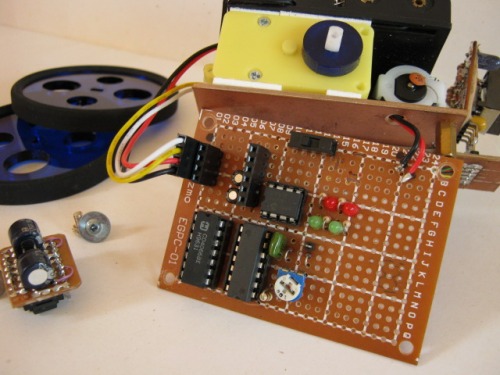
Top view of the main board showing the PIC, logic chips, LED indicators, trimpot (speed control, for PWM)
Another view of the main board, motor driver board removed..
HARDWARE UPDATE : march 26, 2012
==============================
still using DC geared motors for locomotion but changed to piacxe 08M for the proccessor and an ultrasonic module for sensing..
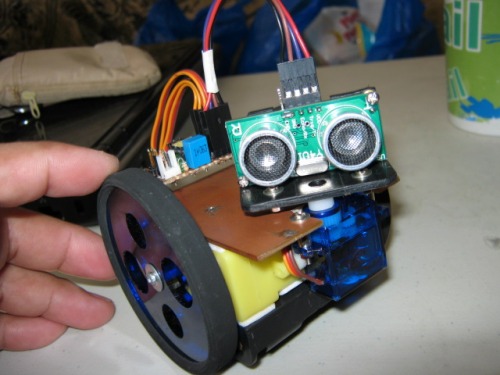
side view..
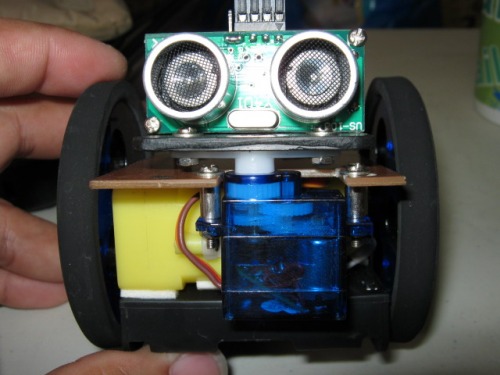
front view..shows how servo pan is mounted

now the picaxe board...and yeah its working now ... :-)
maybe I will just post THIS a new BOT entry? still learning picaxe basic syntax.. see ya!!
- Actuators / output devices: Two 3V DAGU gearmotors
- Control method: Full autonomous, IR proximity sensor
- CPU: PIC12F675 & some logic chips
- Power source: 4.8V Ni-Cd pack
- Programming language: Hitech C
- Sensors / input devices: IR proximity sensor (from DPRG site)
- Target environment: rover, wheeled, IR sensor, PIC