

About Me
So, I'm new to LMR, I thought I'd document my current project here.
I'm a software engineer, and must confess to having very little contact to hardware. Probably more than the average person, but probably not as much as most here. That means my progress is going to be slow at first as I accumulate parts, and my work will be shoddy for want of proper tools. Below, you can see me cutting plexiglass with a pocket blowtorch and knife:

Samantha
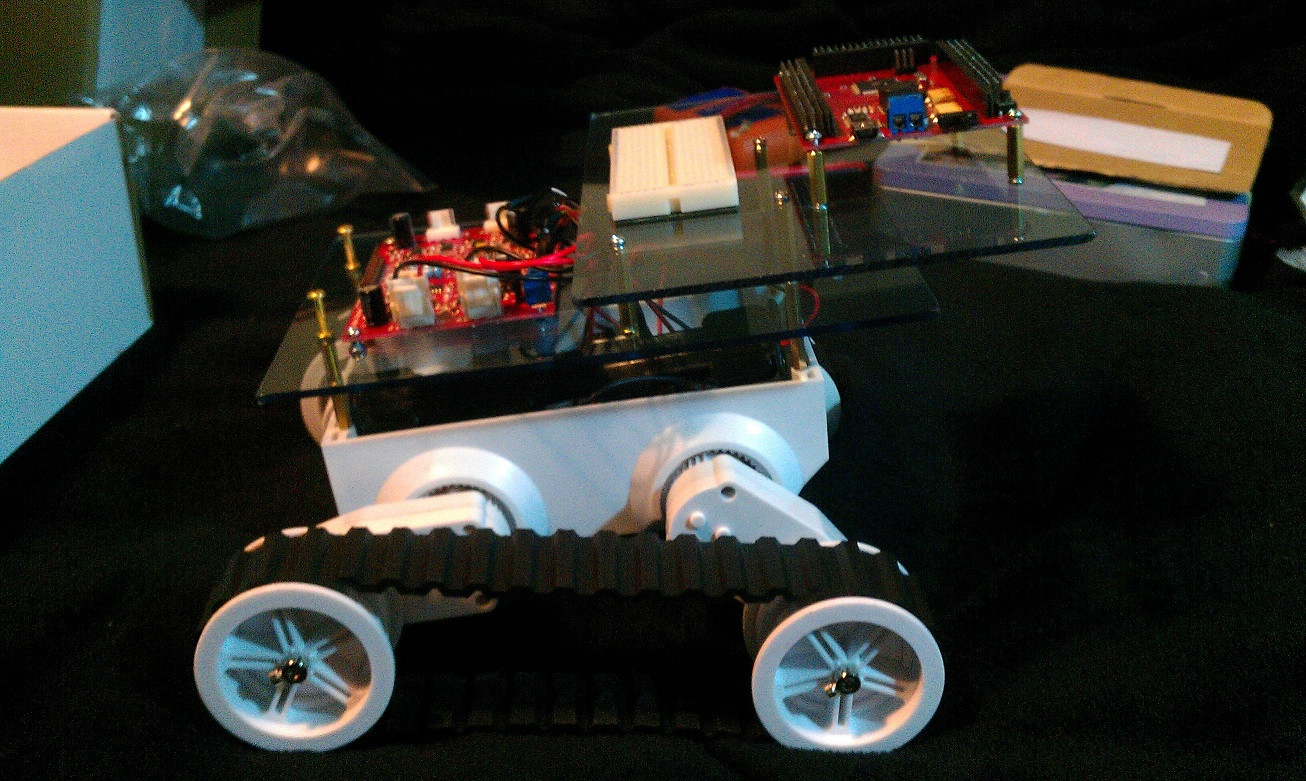
Samantha is based on the 2 motor/encoder Rover 5 chassis, with a Spider board and the 4 channel motor controller. This will be my first substantial arduino project. Despite the two boards being compatible in terms of size and mounting, I have operated to separate them. There are two shelves/platforms. The first is raised for ample access to the battery compartment. The motor controller is on the lower shelf (I may move it *beneath* if I want to mount more components. The arduino board is on the upper shelf, towards the back for easy conneciton with components (LCD, ranger) mounted on the same shelf. Between the shelves is ample space for a spare batter pack - or any components (eg. GPS) that do not need to be visible.
Currently I have no wire to connect the boards together, so I'm waiting on the postman.
To Do
- Basic Wiring
- Mount forward/back/left/right ultrasonic modules
- Bluetooth
- LCD
- Upgrade to 4WD?
- Code for autonomous roaming
- GPS?
Objectives
My primary goal is to create an autonomous, roaming and navigating robot to gain experience with arduino and generally broaden my horizons. I'm a computer vision research student, and due to personal and professional interests I would like to experiment with segmentation/image tracking, using arduino as the platform for low-level tasks.
Update - 05/03/2012
Progress has been slow with the usual excuses - busy moving house, real work, bad weather, etc. However, I spent yesterday evening attaching the sonars, battery, etc and wiring it up. I haven't done the motor controller yet - I left the appropraite screwdriver for the power terminals at work but hope to do that soon.

I used hot glue to attach stuff - seems simplest, otherwise I need to drill holes and make brackets for everything. I just don't have enough materials and I don't trust myself with the perspex much. There's a solar powered mobile phone battery backup for the arduino controller. The stock 6xAA battery clip for the motor controller. LCD display, 4 sonars - front, back, left and right. The left/right sonars are angle towards the front. Blue LED inside that lights up the chassis nicely in the dark. Bluetooth sticking out the back - will probably be used for remote control.
Update - 07/03/2012
On Wednesday 7th we had a Show and Tell event with the BCS and Computer Science department, so I took the just-finished Samantha along.

It was far from the most interesting project there, but everyone enjoyed it. And I was pleased to finally have it up and running - can't believe it sat half-completed for so long and only took me a few hours to finish.
The sonars were misbehaving, so I changed my function to take three samples and return an average, this improved behaviour but things are still slightly erratic. I spoke to one of my colleagues in field robotics and after checking the datasheet, it seems my timing is off - so I'll fix that soon.
The hardware side at least is complete (for now), so I can write some nice control software. The next likely hardware addition will some more collision detection - maybe IR that will override any higher-level motion requests.
Update - 02/12/2012
This robot's hardware was finished some months ago, with a Raspberry Pi and Lifecam atop for high-level control. I never got around to completing the software. Unfortunately one of the sonars was knocked off by an enthusiastic child at a Raspberry Jam. I always meant to fix it but needed the sonar for another project, and bit by bit I've been pilfering various components so that it's now little more than the spider and motor controller. I've been working with Android quite a bit recently, so I'm considering mounting a Nexus tablet on top to do image processing; not sure how capable it will be but hopefully it will be a nice demonstration. I'll still need to acquire some new sonar or IR sensors for basic obstacle avoidance.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/samantha