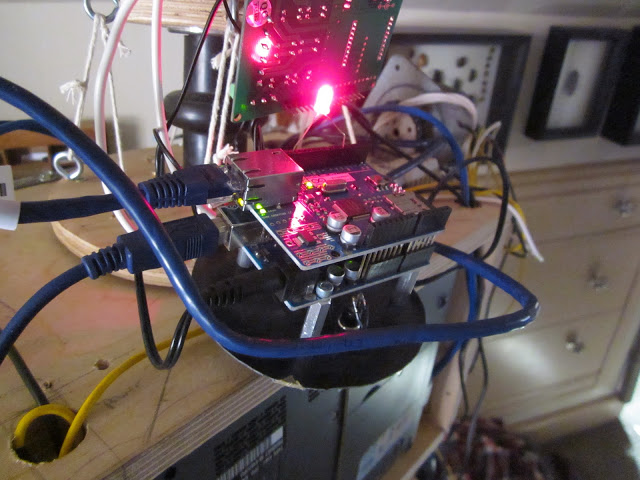
Salvius is a humanoid robotics project that I have been working on over the past year or so. The robot now has night vision and ultrasonic hearing. You can connect to the robot's computer using any wireless enabled device and control the robots actions. You can also use that same connection to see what the robot is seeing and soon you will be able to hear as well. The robot can also synthesize speech from textual input. I have released all of the robots source code under a Creative Commons licence and I will be uploading the latest stable version to my blog in a few weeks.
I chose the name 'Salvius' because it was a bit of an unconventional name for a robot. The name itself dates back to the roman empire but I liked it because the name was similar to the word 'salvaged' since I recycled a lot of materials into the robot's design that would have been otherwise thrown away. To the best of my knowledge Salvius is the first open source humanoid robot of this size to be built in the United States.
The robot still requires work before it can move around on its own because I still need to get another motor controller. While I search for another Curtis 12v model: 1204 motor controller I continue to work on many other parts of the robot's design. As soon as I get the motor controller the robot will have fully working autonomous navigation but until then... well lets put it this way: it's not very autonomous when it only has one working wheel.
You sir, have put a lot of effort and money into this, i like it. This is one of the coolest big time robots i’ve seen here. Just asking, is 1 of the duinos handeling the camera, if it is, can i please have a look at your code for it? Thnx and good luck in finishing him!
Greetings. Sorry about this but the camera is actually served through the laptop. Its a USB camera and I use a free program called motion to capture still images from the camera and continuously overwrite the previous image. The laptop is configured as a web server and when you connect to the robot’s wireless connection and then enter the IP adress of the server you can access the control interface. The control interface is basically a webpage with two iFrames. The first iframe is set up with a bit of javascript to give it a rapid refresh rate and it shows the current image that the camera is seeing so you essentially are viewing a live feed of the camera. The second I frame has control buttons which you can click to control the robot. I would love to get an IP camera (a camera with its own ethernet port and IP address that plugs directly into the router) but unfortunately I haven’t been able to find quite the one that I want yet. I will tell you that my code is still a bit unstable and I am currently having problems with preventing the browser from caching the image in the iFrame. If you would still like me to upload the code as it is I will but otherwise I should be completed with my first version of the code two to four weeks from now. Once I have a stable working version I plan on making it easially available to everyone.
Hm, was hoping to find some info for Arduino + Webcam = Good Colour Recognition Sensor. And i’ll be happy to wait for you to upload the code if you feel it’s right.
I love your the new voice on your robot. Can you go a little more in depth about your electronics for it? Is it with the arduino or a seprate unit? Thanks
I tested the robot’s speaker system using an online text-to speech synthasizer connected to the robot’s built-in laptop. The engine I used for the test is here: http://codewelt.com/proj/speak. The robot also has voxforge as a tts engine installed on the computer which I have been meaning to expiriment around with more but I haven’t had the time. I have found that German tts engines sound the best (not sure why). The robots voice is produced by an audio amplifier that I built myself. The amplification has great volume but it gets chopped up due to minor voltage oscilations in the amplifier circuit. I have become fond of the imperfect sound produced by the amplifier because the audio sounds a bit deeper due to the oscilations so it is like the robot has its own unique voice.
I ordered them from Trossen robotics. They are the same motors that I used back when I competed in the FIRST Robotics Competition. I can tell you that they are some of the best motors for the best price that you will be able to find. I just checked on Trossen’s site and they appear to no longer have the motors. This is probably because these motors are in such high demand because tons of schools use them when competing in FIRST.
We have been searching some application references in which WIZnet solution is applied, and found your project “Salvius“ using Ethernet Shield. In the Ethernet Shield WZnet’s W5100 chip is embedded. Your development looks very cool & smart.
Recently we opened WIZnet Museum (http://wiznetmuseum.com) site. This is a academic-purposed collection of open projects, tutorials, articles and etc from our global customers.
If you are O.K. we would like to introduce your projects in here. Hopefully, you will allow this.


 Salvius is a humanoid robotics project that I have been working on over the past year or so. The robot now has night vision and ultrasonic hearing. You can connect to the robot's computer using any wireless enabled device and control the robots actions. You can also use that same connection to see what the robot is seeing and soon you will be able to hear as well. The robot can also synthesize speech from textual input. I have released all of the robots source code under a Creative Commons licence and I will be uploading the latest stable version to my blog in a few weeks.
Salvius is a humanoid robotics project that I have been working on over the past year or so. The robot now has night vision and ultrasonic hearing. You can connect to the robot's computer using any wireless enabled device and control the robots actions. You can also use that same connection to see what the robot is seeing and soon you will be able to hear as well. The robot can also synthesize speech from textual input. I have released all of the robots source code under a Creative Commons licence and I will be uploading the latest stable version to my blog in a few weeks.