



Salvius
 Salvius is a humanoid robotics project that I have been working on over the past year or so. The robot now has night vision and ultrasonic hearing. You can connect to the robot's computer using any wireless enabled device and control the robots actions. You can also use that same connection to see what the robot is seeing and soon you will be able to hear as well. The robot can also synthesize speech from textual input. I have released all of the robots source code under a Creative Commons licence and I will be uploading the latest stable version to my blog in a few weeks.
Salvius is a humanoid robotics project that I have been working on over the past year or so. The robot now has night vision and ultrasonic hearing. You can connect to the robot's computer using any wireless enabled device and control the robots actions. You can also use that same connection to see what the robot is seeing and soon you will be able to hear as well. The robot can also synthesize speech from textual input. I have released all of the robots source code under a Creative Commons licence and I will be uploading the latest stable version to my blog in a few weeks.
I chose the name 'Salvius' because it was a bit of an unconventional name for a robot. The name itself dates back to the roman empire but I liked it because the name was similar to the word 'salvaged' since I recycled a lot of materials into the robot's design that would have been otherwise thrown away. To the best of my knowledge Salvius is the first open source humanoid robot of this size to be built in the United States.
The robot still requires work before it can move around on its own because I still need to get another motor controller. While I search for another Curtis 12v model: 1204 motor controller I continue to work on many other parts of the robot's design. As soon as I get the motor controller the robot will have fully working autonomous navigation but until then... well lets put it this way: it's not very autonomous when it only has one working wheel.




- Actuators / output devices: Servos, DC electric motors
- Control method: Autonomous or with using any wireless enabled device
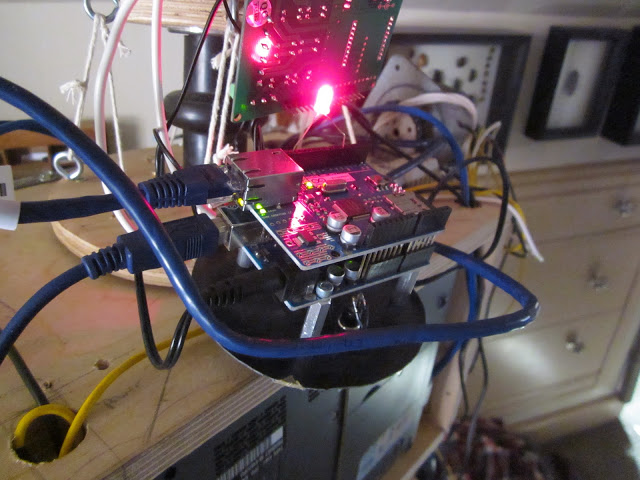
- CPU: Arduino, Lego nxt, Lenovo IdeaPad S10e
- Operating system: Ubuntu (Linux)
- Power source: 12v 75a gel-cell battery
- Programming language: Arduino, RobotC, PHP
- Sensors / input devices: microphone, PIR sensor, camera, IR emitters/detector, LED light sensor, 4 touch sensors
- Target environment: domestic environment