

- Lenght: 10.5 cm
- Width: 7.5 cm
- Height: 8 cm
- Weight: 144 g
Components
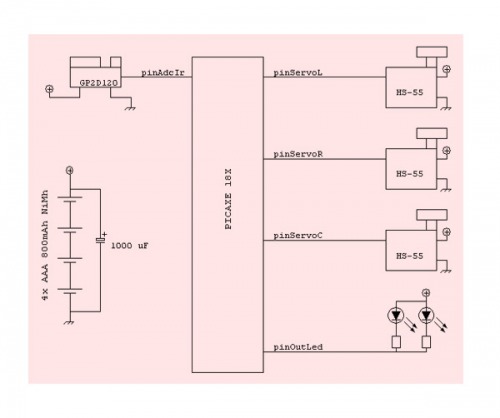
- 1x Picaxe 18X
- 4x AAA 800mAh NiMh cell
- 3x Hitec HS-55 servo
- 1x Sharp GP2D120 IR Sensor
Schmatics
Source code
'pin
symbol pinServoL=2
symbol pinServoR=3
symbol pinServoC=1
symbol pinAdcIr=0
symbol pinOutLed=6
'servopos
symbol servoLF=175
symbol servoLB=100
symbol servoLN=145
symbol servoRF=125
symbol servoRB=175
symbol servoRN=150
symbol servoCR=170
symbol servoCL=140
symbol servoCN=157
symbol servoT=150
symbol warn=60
'brain
symbol irReadM=b13
symbol irRead=b12
symbol prefSide=bit0
symbol leftSide=0
symbol rightSide=1
'init brain
prefSide=leftSide
'init robot
servo pinServoL, servoLN
servo pinServoR, servoRN
servo pinServoC, servoCN
high pinOutLed
pause 2000
'shakedown
for b2=0 to 20
servo pinServoC, servoCL:pause 50
low pinOutLed
servo pinServoC, servoCR:pause 50
high pinOutLed
next
'init robot
servo pinServoL, servoLN
servo pinServoR, servoRN
servo pinServoC, servoCN
high pinOutLed
pause 200
walk_forward:'walk forwart till obsta
servopos pinServoC,servoCR:pause servoT
servopos pinServoR,servoRF:pause servoT
do
servopos pinServoC,servoCL:pause servoT 'right legs on the ground
servopos pinServoR,servoRB: servopos pinServoL,servoLF: pause servoT 'left forward - right backward
servopos pinServoC,servoCR:pause servoT 'left legs on the ground
servopos pinServoR,servoRF: servopos pinServoL,servoLB: pause servoT 'right forward - left backward
'chk ir
readADC pinAdcIr,irReadM
if irReadM>warn then
low pinOutLed
if prefSide=leftSide then
goto try_left
else
goto try_right
end if
else
high pinOutLed
end if
loop
end
try_left:'step left then compare readings
servopos pinServoC,servoCL:pause servoT
servopos pinServoL,servoLF:pause servoT
for b2=0 to 2
servopos pinServoC,servoCR:pause servoT 'left legs on the ground
servopos pinServoR,servoRF: servopos pinServoL,servoLF: pause servoT 'left forward - right forward
servopos pinServoC,servoCL:pause servoT 'right legs on the ground
servopos pinServoR,servoRB: servopos pinServoL,servoLB: pause servoT 'left backward - right backward
next
readADC pinAdcIr,irRead
if irRead<warn then
prefSide=leftSide
goto walk_forward'clear -> ok go forward
else
if irRead<irReadM then
goto go_left 'left is better -> go left at will
else
goto go_right 'right is better -> go right at will
end if
end if
end
go_left:'rotate left till clear
servopos pinServoC,servoCL:pause servoT
servopos pinServoL,servoLF:pause servoT
do
servopos pinServoC,servoCR:pause servoT 'left legs on the ground
servopos pinServoR,servoRF: servopos pinServoL,servoLF: pause servoT 'left forward - right forward
servopos pinServoC,servoCL:pause servoT 'right legs on the ground
servopos pinServoR,servoRB: servopos pinServoL,servoLB: pause servoT 'left backward - right backward
readADC pinAdcIr,irRead
if irRead<warn then
prefSide=leftSide
goto walk_forward'clear-> ok goforward
end if
loop
end
try_right:'step right then compare readings
servopos pinServoC,servoCR:pause servoT
servopos pinServoL,servoRF:pause servoT
for b2=0 to 2
servopos pinServoC,servoCL:pause servoT 'right legs on the ground
servopos pinServoR,servoRF: servopos pinServoL,servoLF: pause servoT 'left forward - right forward
servopos pinServoC,servoCR:pause servoT 'left legs on the ground
servopos pinServoR,servoRB: servopos pinServoL,servoLB: pause servoT 'left backward - right backward
next
readADC pinAdcIr,irRead
if irRead<warn then
prefSide=rightSide
goto walk_forward'clear-> ok goforward
else
if irRead<irReadM then
goto go_right 'right is better -> go right at will
else
goto go_left 'left is better -> go left at will
end if
end if
end
go_right:'rotate right till clear
servopos pinServoC,servoCR:pause servoT
servopos pinServoL,servoRF:pause servoT
do
servopos pinServoC,servoCL:pause servoT 'right legs on the ground
servopos pinServoR,servoRF: servopos pinServoL,servoLF: pause servoT 'left forward - right forward
servopos pinServoC,servoCR:pause servoT 'left legs on the ground
servopos pinServoR,servoRB: servopos pinServoL,servoLB: pause servoT 'left backward - right backward
readADC pinAdcIr,irRead
if irRead<warn then
prefSide=rightSide
goto walk_forward'clear-> ok goforward
end if
loop
end
walk and avoid obstacles
- Actuators / output devices: 3x Hitec HS-55 servo
- Control method: autonomous
- CPU: picaxe 18x
- Power source: 4x AAA 800mAh NiMh cell
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: flat surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/rosalinda-3-servo-hexapod


