After buying an Arduino starter kit and playing a little bit with it I found out that it's possible to create robots with it. Doing some research on internet I found this amazing website and I was amazed and inspired by all your creations here!
I decided to create my own little robot. I really like most of the robots Protowrxs create, so I am trying to imitate some of his creations (TED the biped).
This is my first robot, so I have made lots of mistakes, but with all the information available in this website it has been easy to have something that kind of works.
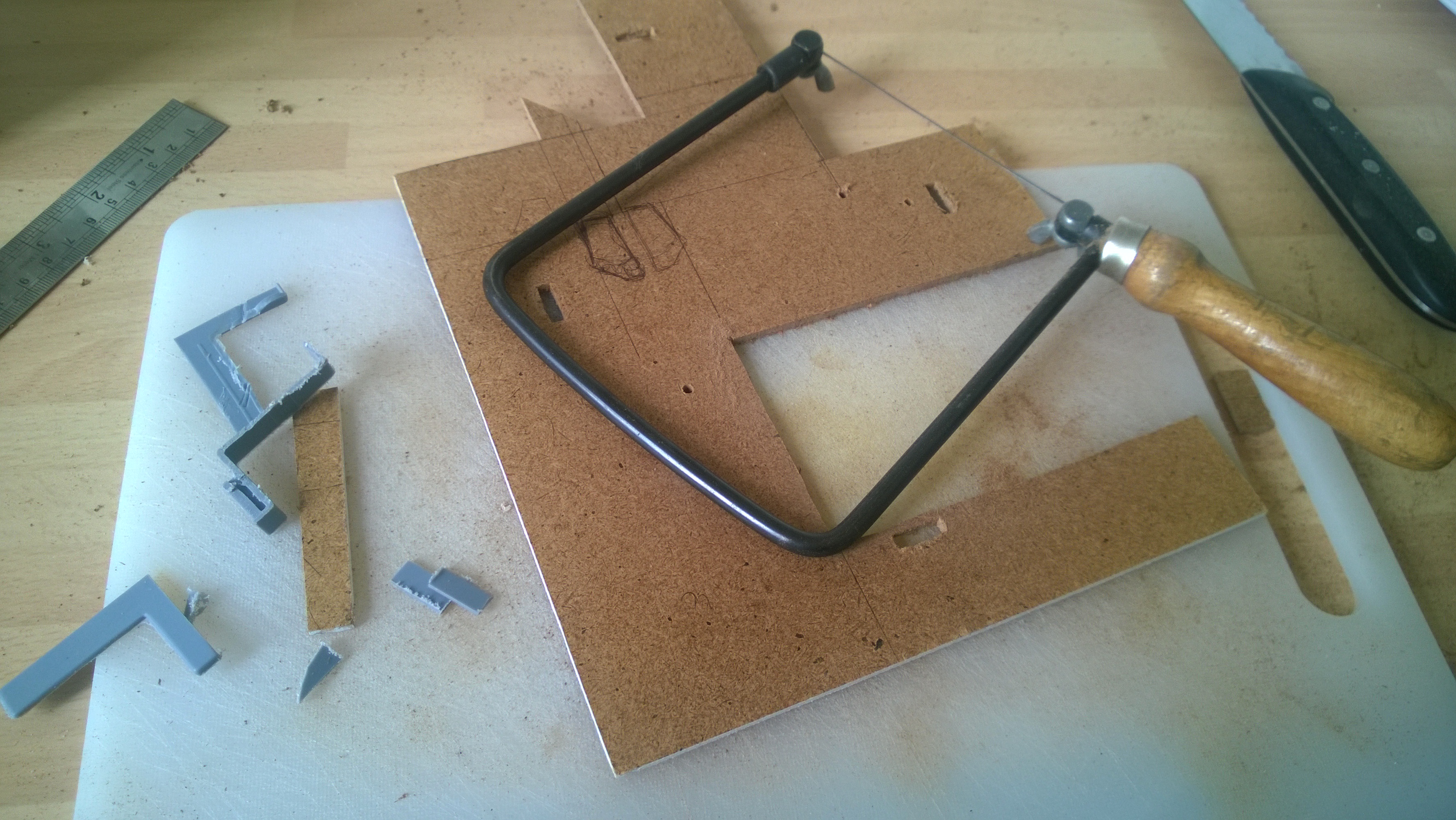
I used a Micro Magician V2 for the "brain" (I used TED the biped Base Code) and I built the chassis and feet out of the back of a picture frame. The "legs" are made cutting a plastic piece used to hide some screws in a IKEA mirror.
It has a very high center of gravity (due to the position of the batteries) and the plastic "legs" are quite weak, so the robot is quite wobbly.
I'm plannig to add a couple of LEDs and a piezo, and hopefully I will be able to create some interesting behaviours.
Thank you,
Luismi
UPDATE 30/08/2014
I finally added a couple of LEDs and a piezo. I have been trying to make him "dance" while he is playing the Imperial March. There must be a bug in my code that makes the melody stops for a second though.
Every year my company gives their employees a couple of days to work on whatever they want. It's called 'creative day'. The third day everyone who has worked on something has to present his (or their) creations to the rest of the team.
For this year I made a little shortfilm with Rodribot. I know it is a weird update, as I actually didn't change or updated anything on the robot, but I think you may find the little movie... interesting.. :)
It’s quite nice and fast! Well done! Makes me want to try a biped too, especially that it would then leave a lot of extra pins for sensors and special effects. Looking forward to see what you will add.
Cool work on the bi-ped. Nice to see that you got it working on your first try. This one has a character of its own! I like it’s “super-quick” motion. And yes, TED is the bi-ped to look up to. I had also given it a shot, but had several balancing issues. I hope to get those sorted out soon. Congrats on the nifty build and welcome to LetsMakeRobots!
The video s awesome. “Project Skynet…” hahaha, so cool and it’s very much worth to call it an Update on your page. RodriBot is moving very good, would you mind to share your experience with TED’s code? I believe all of us who built a BoB are using the TED code but every single BoB is moving a bit different.
I didn’t change much of the original TED’s code actually. I just tweaked the values in the NormalWalk() to fit my servos center points and end limits, AND changed the WalkDelay variable from 200 to 100 (that’s why his walking pace is kind of quick).