

|
Hello I'm working on a robotic lawnmower prototype. Right now I'm thinking about what kind of sensors i should just. especially the sensors that will make shore my robot don't drive of the lawn. And there i have a problem. I have no idea how to sloven this. I have been locking at the commercial robots and they all use some kind of wire on the ground so i think that would be a good solution but i don't know how it works. //Reconnnn |
I have had that idea to
I have had that idea to but i couldn’t find a site that explained how it works in an electronic and mechanical way. //Reconnnn
they only explain it from a dog learning perspective an that isn’t that intresting for my lawnmower :p.
wire in ground
Welcome Recon^4
I believe the wire works by putting a signal on the wire (24 kHz or so) and then have a detector in the robot for that frequency of course.
Just make sure you switch on the robot while INSIDE the loop or it will end up in my garden 
DC
wire in ground
Thanks ycdbwycid
Do you know what kind of detector and where i can get or how i can build one?
//Reconnnn
One of these days I want to
One of these days I want to build one especially sinc eI am buying a house with a huge backyard (needless to say in late August I will disappear for a few weeks). My thoughts were to start it at the edge of the yard (assuming yard is fenced in).
The mower goes straight but keeps the fence as close as possible to either side of it. It then uses IR to see if the grass to just left or right has been cut (IE is shorter than the other side of the mower). If the grass is shorter it goes straight. In effect is is a line follower but the “line” is the edge of where the grass has been cut. It tries to keep that line just barely on the inside edge of the mower. It keeps going until all grass underneath has been mowed (runs out of unmowed grass).
Of course this won’t work flawlessly as items such as a shed or pool would cause zones that got mowed faster than other areas. It would have to be checked when you hear it stop so you can go back out and move it to finish the yard.
Sounds like an advanced solution
Hi jklug80
I like your solution a bit advaced i have to say. My idea is to use the same way the comersial mowers use and taht is to let the mower drive a round randomy and hopefuly cut som grass. I hink you will run in to a lot of probems if you are trying to se the hight of the grass especily if you are going to compare hight. The reason is that the normal way the mowers work is that they run very often and will cut all the grass. But the tougt is realy nice when you think about how perfect the grass would be if it all workt and that you woulden be forced to use the mower that mutch.
Ycdbwycid I hve seen that link before and i think it would work nice i will look in to it alot more. But i think i will have some problems wih identfining nd fining some of the components. But I will ask her if I have some problems.
//Reconnnn
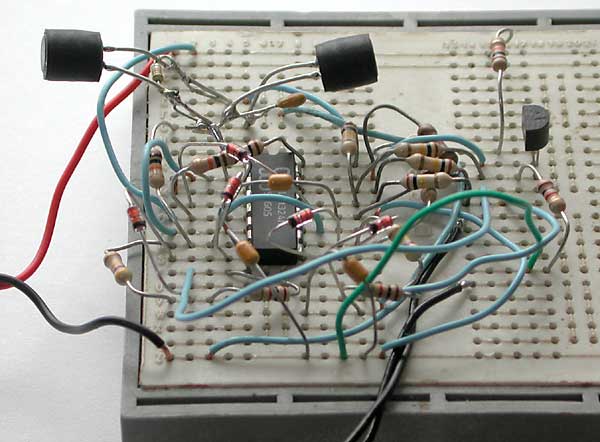
if you check the schematics,
if you check the schematics, it shows all the parts. This guy(?) used SMD but under the section ‘component selection’ he even suggests the ‘normal’ alternatives. He used the normal parts when he was experimenting as this photo shows.
{kind=link}
It’s all standard stuff and regardless of where you are from should all in all not cost more than the equivalent of a couple of euro’s.
By the way; if you look at the photo again you see it’s all plugged into a board used for building prototypes/experiments. If you are planning of getting into electronics, an absolute must.
Doei,
YCD
My problem i think is inductors
Hi
I looked att my local electronics shop and i found most of he components. But i had problem finding the inductors. I use
this site http://translate.google.co.uk/translate?hl=en&sl=sv&u=http://www.electrokit.se/&ei=Xtl7SsCnM4_ajQf72JyIBw&sa=X&oi=translate&resnum=1&ct=result&prev=/search%3Fq%3Dhttp://www.electrokit.se/%26hl%3Den%26rlz%3D1I7ACAW_svSE328it’s a swedish site but i translated it to english I hope it’s a good translation.
I also use this site http://translate.google.co.uk/translate?hl=en&sl=sv&tl=en&u=elfa.se
are you abel to find any inductors hat would work??
BTW I have 2 prototyping bords and I love them.
//Reconnnn
under induktansor/drosslar
under induktansor/drosslar you must be able to find them… My swedish isn’t that good. Had a swedish girlfriend but we never got onto the topic of robotics…
wait i have an idea… well
wait i have an idea… well maybe. this may seem very outlandish. i dont know, you decide. could you have like a gps module like pat’s UAV with the ardupilot. you then upload gps waypoints of where the robot would go and how it would go… it may be a pain in the but to upload all of the points but i guess it could work… someone prove me wrong now.
Unfortunately the accuracy
Unfortunately the accuracy of GPS is only to within a few meters at best, so the mover would still need the ability to navigate locally. The GPS waypoints would still be useful, but only if the area to be mown was pretty darn big.
GPS: accuracy and precision
yep, it’s both accuracy and precision which are the main problems:
I am running a test currently with a serial GPS mouse attached to a PC. I fixed it outside in the garden and take a sample every minute. I will let it run for a couple of weeks and then plot of graph. But the I can already see that it will more or less will look like a ‘star-shaped’ graph. What I mean is: more or less circular with less and less datapoints on the outside (so more in the center).
I can only assume (so far) that the variations are based on inaccuracies in the GPS mouse, atmospheric influences or … I have not google-ed bing-ed that yet. When I have time again and collect all the data I might report here if anyone is interested.
Regarding GPS for lawnmower navigation (i have the same requirements). I will only see that as an indication of where the lawnmower is (roughly) in the garden. As my garden is about 3050meters that makes a bit of sense but for a 75m garden I would not bother. GPS readings combined with dead-reckoning based (e.g. odometer based) together with a ‘map’ might get both higher precision and accuracy. The thing with a map is that you need a strong processor…
I am also contemplating on buried RFID cards in the garden as they will provide fixed points to ‘reset’ the map. RF/ultrasonic/light beacons might be another thing… My problem with this approach is that it is not ‘autonomous’.
Cheers
YCD
I don’t know if anyone has
I don’t know if anyone has seen this, or linked to it yet, but here you go: http://www.youtube.com/watch?v=zuXqg4q3cQ8&feature=related
Definetly has room for imporvment as far as navigation goes, so it won’t help answer those questions, but he talks about using an electronic dog fence so maybe you can get some information about that.
Thanks!!! But??
Have you any idea about what the inductators have to have för specs would be alot faster to find somting sutible then.
\Reconnnn