

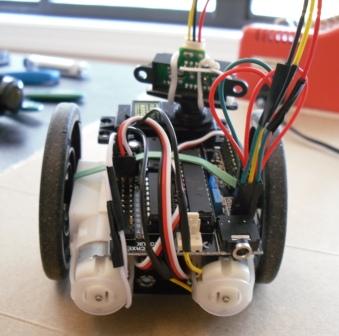
This is the basic Start Here! robot, whose job is to move forward until it detects an obstacle and then stop and decide which direction it should turn. So far I haven't varied anything from the instructions or added anything of my own to it; this is my first robot project ever and I just needed to get my feet wet. (Thanks, LMR, for making it so easy to get started!)
 I call it the drunken vampire robot because it can't move in a straight line (drunken) and it avoids bright sunlight (vampire). The sunlight issue doesn't concern me right now, but I would like to have better control over the robot's motion. One of the motors rotates faster than the other, which is apparently not an uncommon problem. I do wonder if it's a problem with the motors themselves or if it could be caused by wire splicing (small contact area in connection between spliced wires = more resistance = smaller current = slower motor speed?). In any case, solutions I've considered are:
I call it the drunken vampire robot because it can't move in a straight line (drunken) and it avoids bright sunlight (vampire). The sunlight issue doesn't concern me right now, but I would like to have better control over the robot's motion. One of the motors rotates faster than the other, which is apparently not an uncommon problem. I do wonder if it's a problem with the motors themselves or if it could be caused by wire splicing (small contact area in connection between spliced wires = more resistance = smaller current = slower motor speed?). In any case, solutions I've considered are:
- Increase the radius of the slower wheel until its speed matches the faster one. Not a great option, since I'd have to increase the radius by about 5 mm to makes the speeds match, which would make the robot significantly lopsided and could cause other problems with the motion.
- Learn a general method for controlling motor speed. This seems to involve pulse width modulation (PWM), which is unfamiliar to me but seems very useful, so this is the route I plan to take.
Next step: Learn what this PWM business is all about. I get the general idea behind pulse width modulation: Approximate an analog voltage by turning a digital signal on/off, adjusting frequency and duty cycle appropriately. Most of it seems to be programming, but it requires a timer. So I need to investigate: Does my Picaxe 28X1 have a timer in it? Or will I need to get more/different electronics hardware?
In any case, hopefully I will soon be posting another version of this robot that involves some modifications of my own.
Trundles around attempting to avoid obstacles (and sunlight).
- Actuators / output devices: 143:1 Solarbotics gear motor (x2), Futaba S3003 Servo
- CPU: Picaxe 28x1
- Power source: 4 rechargeable AA cells
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robot-project-1-take-1-drunken-vampire-robot
