

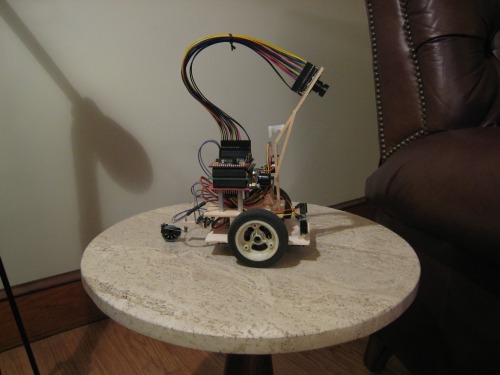
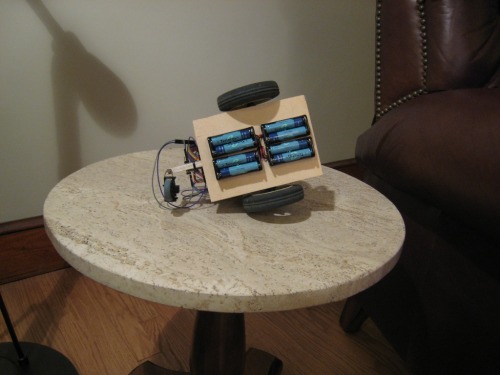
After some testing with Robot Bravo I realized that it would be helpful to have some other sensors to supplement the camera based vision. I built a new platform with two sonar and two IR sensors. Here is video of Charlie operating with only those four sensors. The camera is not used. Now I have a much better platform to dig deeper into vision processing for object detection, navigation, etc.


- Actuators / output devices: pre-modified servos
- Control method: autonomous
- CPU: Blackfin BF537
- Power source: 8x AAA NiMH
- Programming language: C
- Sensors / input devices: camera, Maxbotix EZ1, Sharp GP2Y0D810Z0F
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robot-charlie
