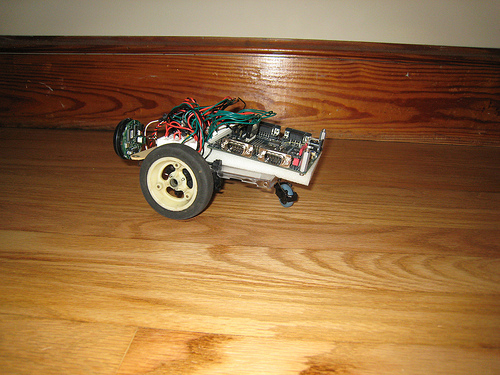
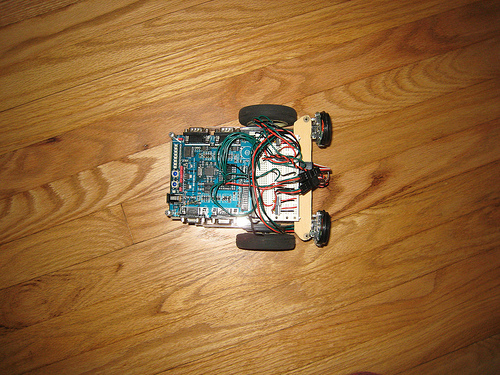
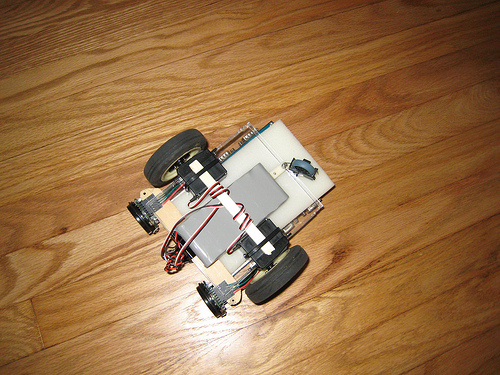
you say “went” and “turned out”, does this mean the project is over or are you trying to fix the problem? it looks like a clean, nice looking bot. good job. how did programming go for you? i mean besides dealing with the broken servo
early retirement This bot has been torn down and retired early. The servos were at least 12 years old that I hacked for Robot Alpha. I’m working on a different bot now. For my new one I bought two pre-modified servos from junun.org. I don’t have any pictures or a page up for the new bot yet.