



Robot Alpha
My first robot. Basic obstacle avoidance attempted, but it turned out that one of the servos wasn't working right, so it mostly just went in circles.
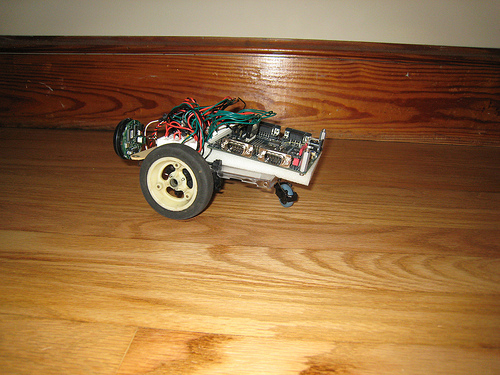
obstacle avoidance
- Actuators / output devices: modified Futaba S-148 servos
- CPU: ARM7
- Power source: 9.6v old nicad RC transmitter battery
- Programming language: C
- Sensors / input devices: Poloroid style ultrasonics