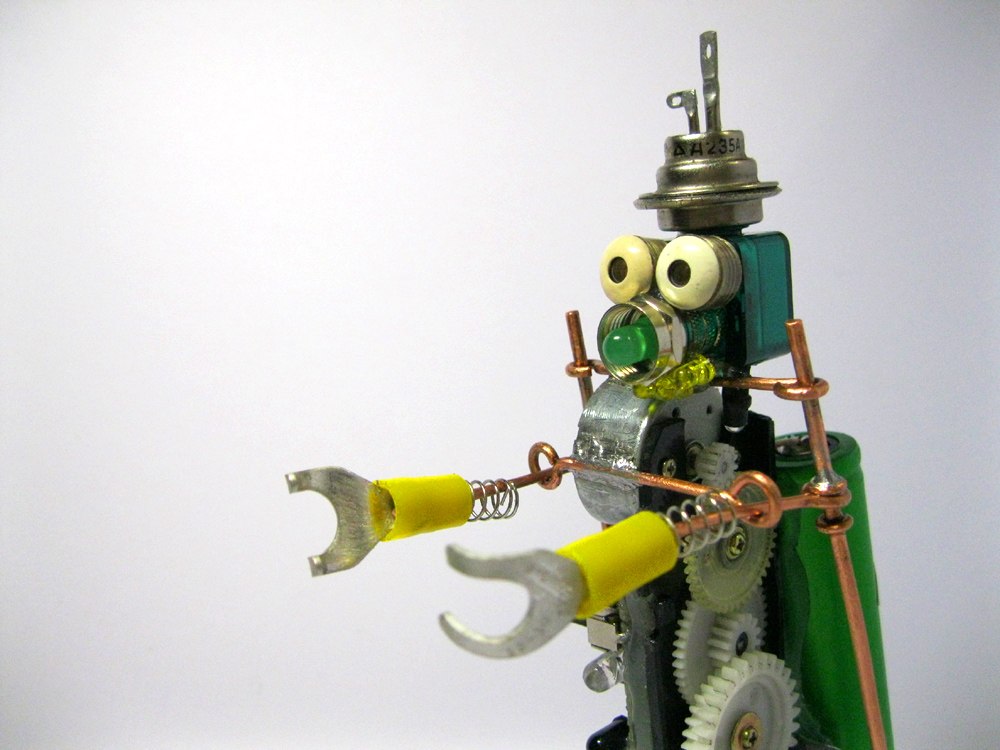
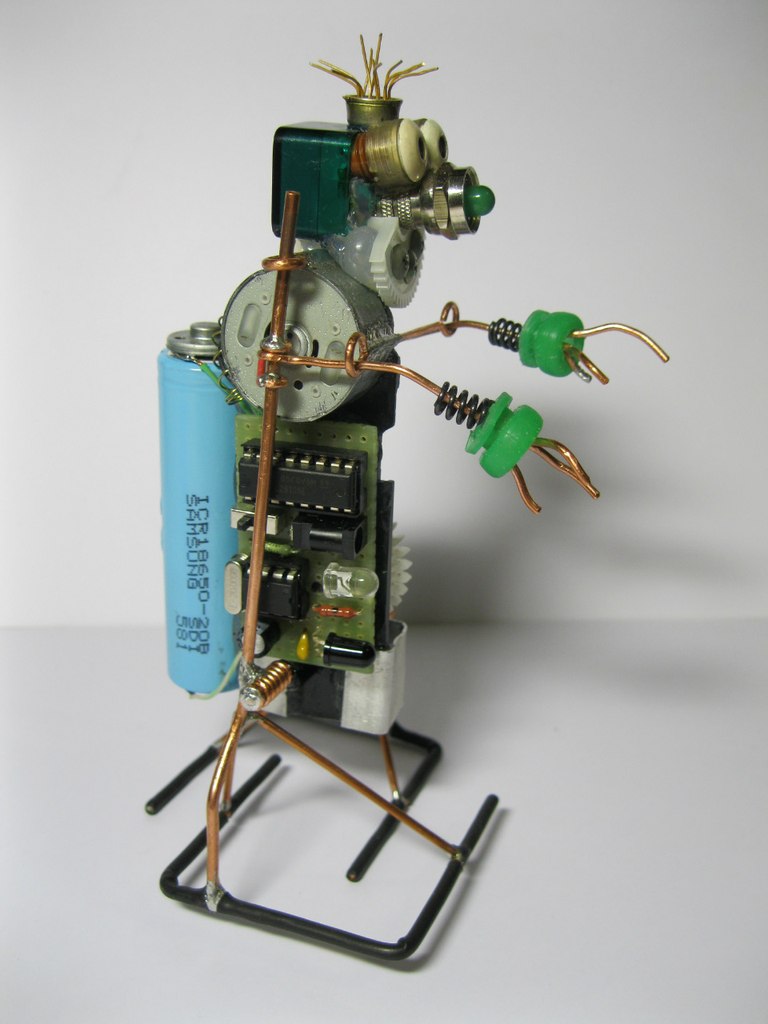
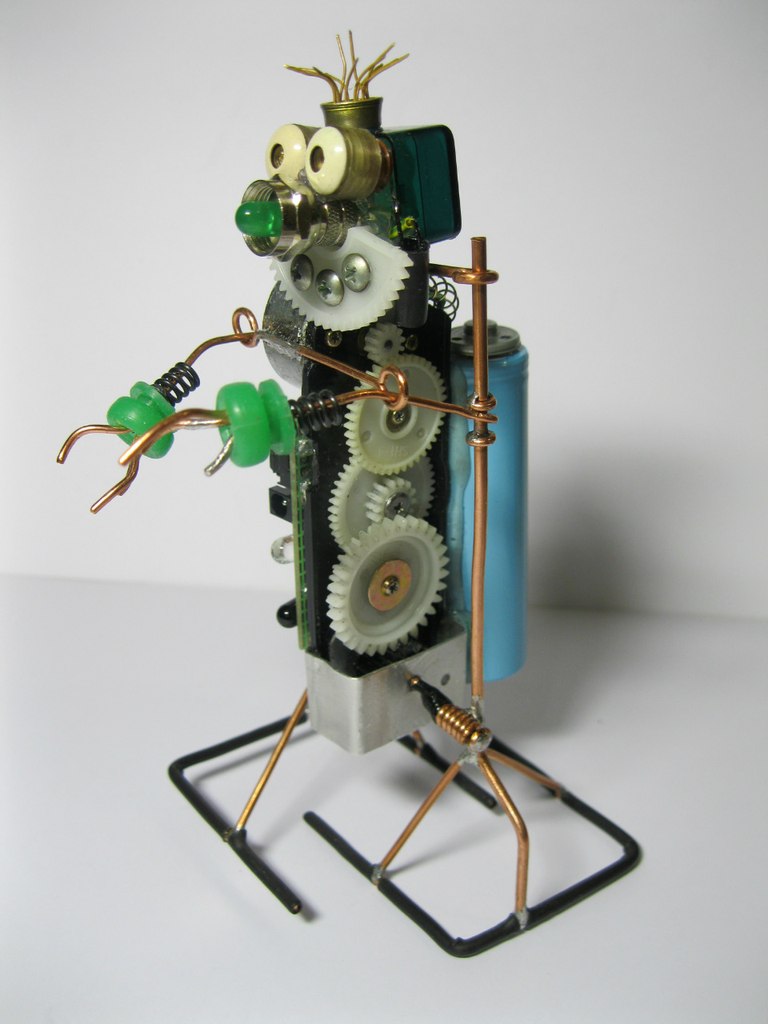
The main part of the robot (block gears) taken from the old model CD-ROM, which were not driven by a belt and through the gears. Microcontroller PIC 12F629. The robot walks straight(a little arc), and when it detects obstacles steps back, a little waiting and goes five forward. Functions a bit, just walking))
I would have gladly made a robot for you, but I live on the opposite side of the globe), I don’t know what your rules for obtaining a Green Card for robots 8)))).
These are really awesome, great job! I love the faces of the robots, they really turn them into characters. It’s amazing that you got them to function as well. Keep up the good work!