In the works for RIOS, from the mastermind himself, Laurent… 3D imaging! All of these images were captured with just an L6 arm and a Sharp GP2D12 sensor rubber-banded to the gripper servo!
It can do 64x64, 128x128 (shown here), or 256x256 resolution. It uses a formula to correct for the non-linear response of the GP2D12 sensor. This functionality will be included in the 1.04 update that should be available this week! For now, it’s a very interesting tool. Later, it will be able to locate items to pick up!
Oh, wow, this is so cool! Laurent is simply amazing! The imaging capability is going to see some interesting applications. Imaging without a camera and less expensively done!
not as fast as a camera anyway, it takes several minutes to browse an area and build the grayscale bitmap, but it’s 3D datas, so yes, many interesting things to do with that…
this free Leveller program is a demo, so it allows only 150X150 resolution, i’m trying to find another free program to display 3D grayscale bitmap with a better res.
Just as a followup from another thread, has any more development or info generated on using the GP2D12 distance sensor for optical object detection? Looking at the GP2D12 data sheet, the GP2D12 has a useful detection range of 30 cm. Has anybody else tried the GP2D12 for developing esentially bitmap images of objects similar to the images in this thread?
Maybe I’ve watched too many episodes of CSI, but the stated way the images were produced doesn’t really pass my “snicker test”. Too many things just don’t line up from the info given.
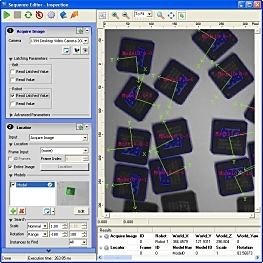
I think that the solution of the problem would be something like this picture, meaning that sensor can detect object and calculate it’s axes so user could demant from arm where to pick it up regarding on axes
For now there’s no more development on the 3D scanner for RIOS,
Object recognition is a big piece and i’m still searching an “usable” way to solve this deal.
An easy way to detect object is a webcam and a software to handle image processing like this free and powerful one : roborealm.com/
We’d work together in the past to develop an interface with Visual Sequencer (nickname “SEQ”) take a look here : roborealm.com/help/Lynxmotion_Seq.php
it allows their software to takes decisions according to the image from the webcam and then control SEQ thru its socket server to launch sequences.
The 3D scanner for RIOS is not a webcam and it’s very slow to have a 3D image, so i’m not sure it’s the best way to detect and pick up objects, maybe using a Roborealm interface with a webcam is better.
The 3D scanner could be used to scan the arm environement rather than to detect object to pick up, this way the arm could auto avoid obstacle automaticaly after an unique 3D scan at the beginning.
I think it’s the way i will make the 3D scanner function to evolve.










{kind=link}
{kind=link}