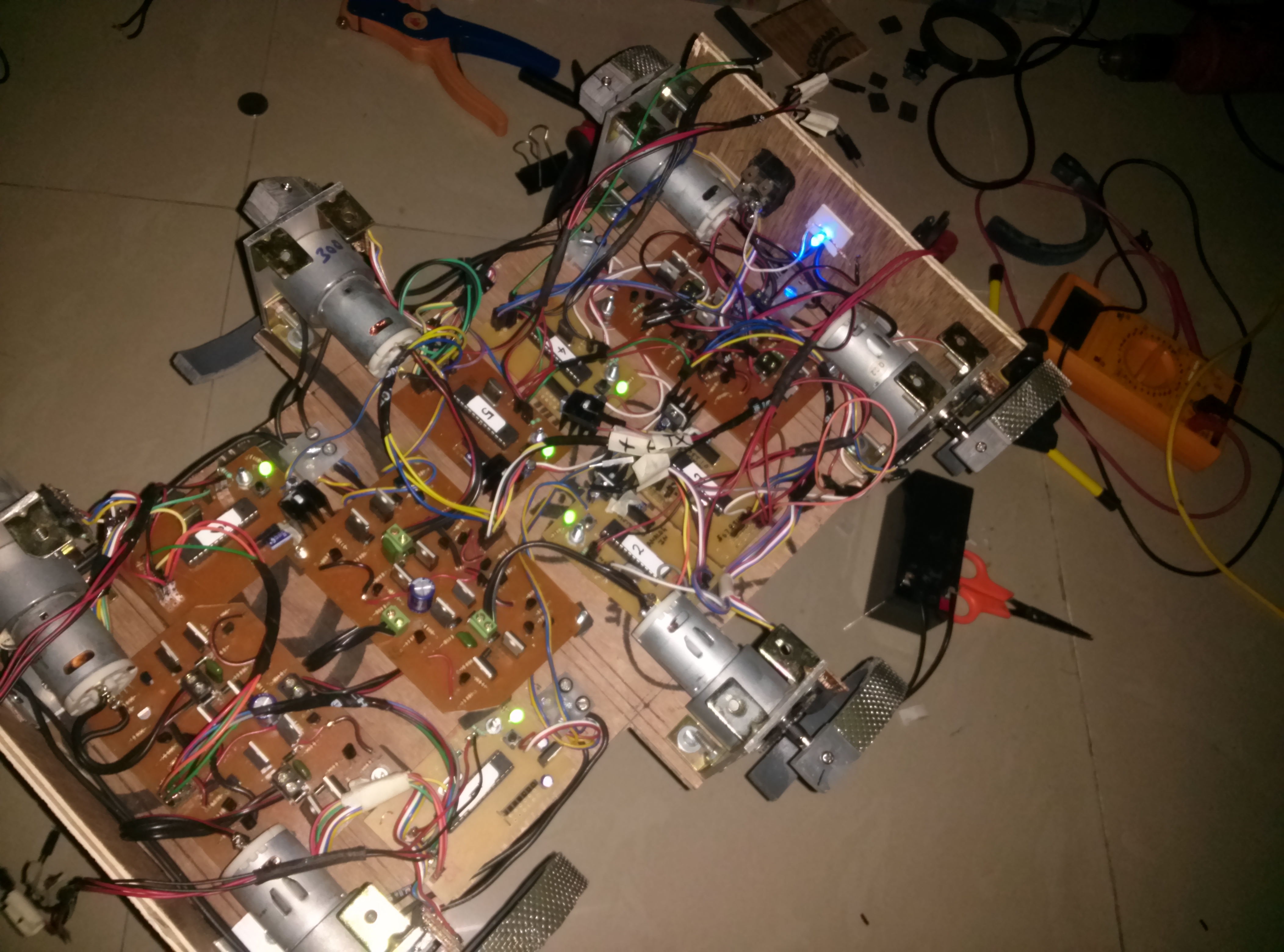
RHex is a six-legged robot with inherently high mobility. Powerful, independently controlled legs produce specialized gaits that devour rough terrain with minimal operator input. RHex climbs in rock fields, mud, sand, vegetation, railroad tracks, telephone poles and up slopes and stairways. It had been made completely from scratch. Almost every part of this project is homemade.
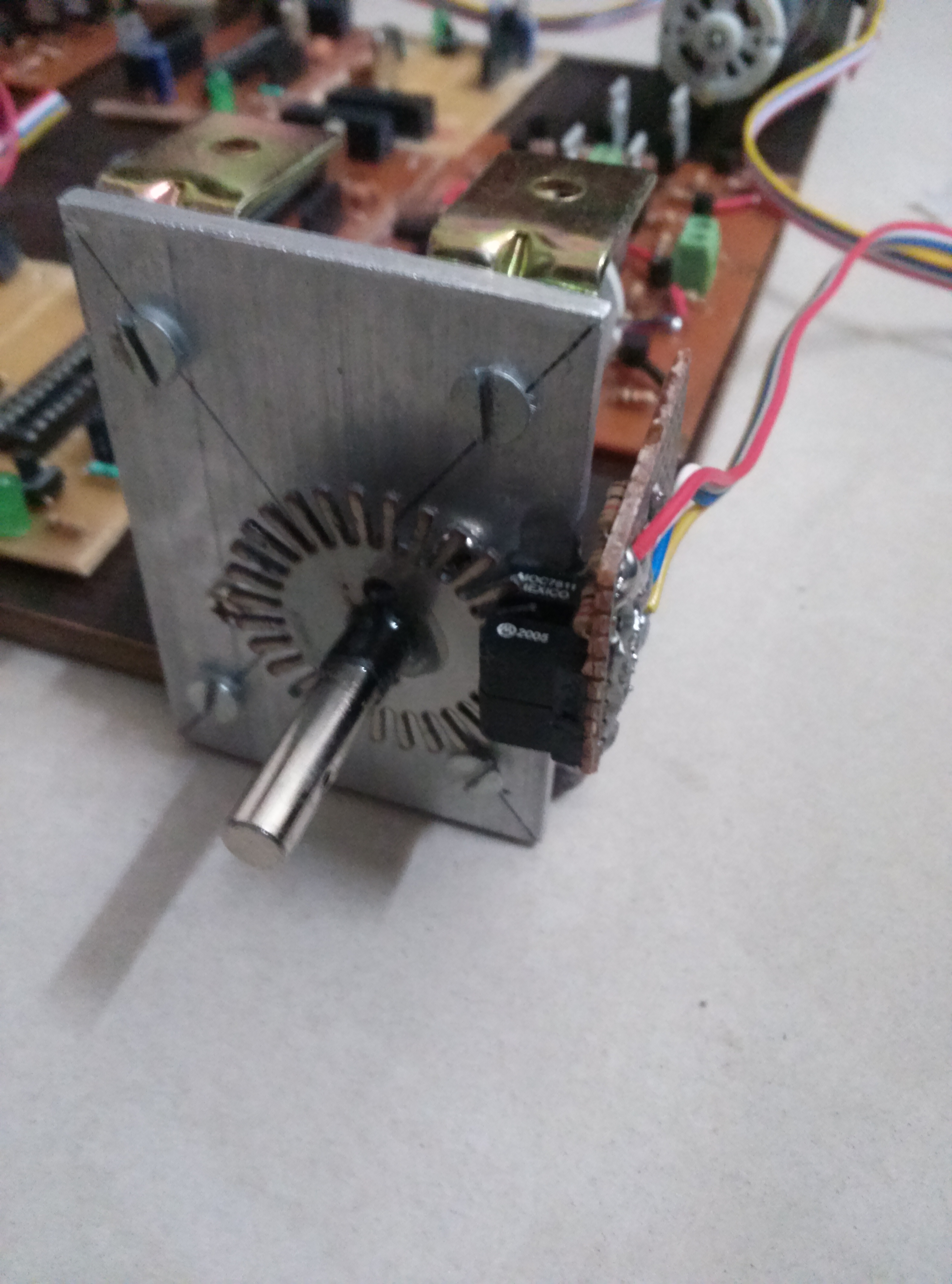
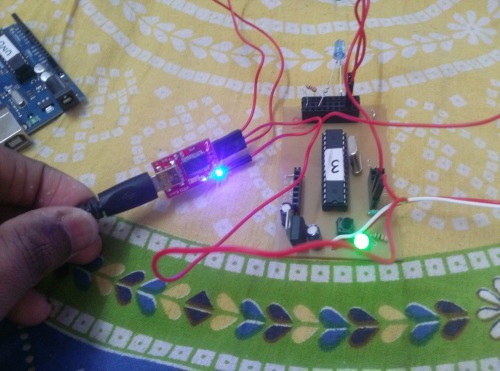
I have used 6 arduinos, 1 for every motor connected to the legs. The speed of the motor is calculated using the Quadrature encoder which is connected to the motor, and PD controlling of the motor speed and position is done by each arduino. The 6 arduinos communicate with each other in such a way that that a stable gait is obtained.
Check my blog to gain more info on PD motor controlling and quadrature encoder:
This is a really impressive robot!! I’ve wanted to build one for a long time…and the fact that you’ve made the parts from scratch is cool…can’t wait to see a video of it in action!
Also which legs did you end up using ? (wood,pvc,metal or the reinforced one) and what supply are you using to power the whole system?
I used the Reinforced leg which I made by stacking 3 layers of PVC pipe and 1 layer of steel net. I bonded them using epoxy. I am using an ATX power supply from an old PC.
The motors are of 12V and 300 RPM, the RPM is controlled using PID control. I have the video but its very small 5 seconds or so and its not stable because the quadrature encoders are not accurate enough. But I am working on it to make it stable. I will upload the video soon. The quadrature encoders are also homemade so the problem is an expected one.
I love wheggs! That is a very good use of wheggs (the combination of wheel/legs that you’re using.
Maybe this is what I can do for Steam Automaton Chico. I want to do something very out there for Chico and I have a lot of time to decide. And it would be nice if he could do stairs also.
I love wheggs! That is a very good use of wheggs (the combination of wheel/legs that you’re using.
Maybe this is what I can do for Steam Automaton Chico. I want to do something very out there for Chico and I have a lot of time to decide. And it would be nice if he could do stairs also.
Steam Automaton-Chico will Steam Automaton-Chico will be one of the series of steampunk flavored robots based around the Marx Brothers. I have most of the parts and designs for Groucho, Harpo, and Zeppo. Chico has eluded my creative mind for a while because he should be stranger than the others.
Is there any reason you used six Arduinos? I’m wondering why you used six Arduinos to control the motors.
You could have used a single Teensy 3.1 (around $20 from Adafruit). It’s built around an ARM chip, but it is compatible with the Arduino with a few downloaded extensions. It’s a small,board, about the size of the Arduino Pro Nano, but has a lot more interrupts and PWMs. Not to mention around 64k RAM.
Please don’t get me wrong; I’m quite impressed with what you’ve done.
6 AtMega328 directly soldered still costs less than a single teensy in most parts of the world. The cheaper teensy i could get would cost 35€ and arrive after 2weeks, while i can buy AtMega328 chips at 4,20€ each at a near hardware store.
AtMega328 has 4 PWM, so 2 would have been enough.
It’s still a wonderful job, as soldering it all and making all the chip to move together it’s awesome!
I needed 2 hardware interrupt pins for each quadrature encoder to achieve full resolution and atmega328 has only 2 hardware interrupt, so I had to use one for each motor. And 6 atmega328 costed me around $20 a little bit cheaper than teensy 3.1. The complete hardware should work parallely so using multiple ships was necessary. And I know that Teensy is an excellent option because it has 8 hardware interrupts and lots of pwm pins and has parallel processing, but I had to complete my project faster due to time constrains so I didn’t use new hardware.
Thanks for suggesting the Teensy 3.1, I thought of using it but I did not want to move to new hardware as I had to complete the project faster. And please keep on suggesting new things as I am new to electronics.
Actually I was inspired by the RHEX which was made by Boston Dynamics. Mine is just a poor version of the RHEX, I had actually tried to save a lot of money in each and every part of the project. Mine does not run an operating system like the original RHEX. I have hardcoded each and every part so it needed less processing power.
Those motors are made by Nichibo and I got these in a local electronics store in mumbai,india. These are geared motors with 300 RPM and they are rated to handle 30 kgcm torque. They are similar to this motor
hey i am also building a rhex at my project and i am entirely new to this stuff could you help me out listing the componenets and their specification i would need please [email protected] also could i get your mail for correspond help bro