



RHex
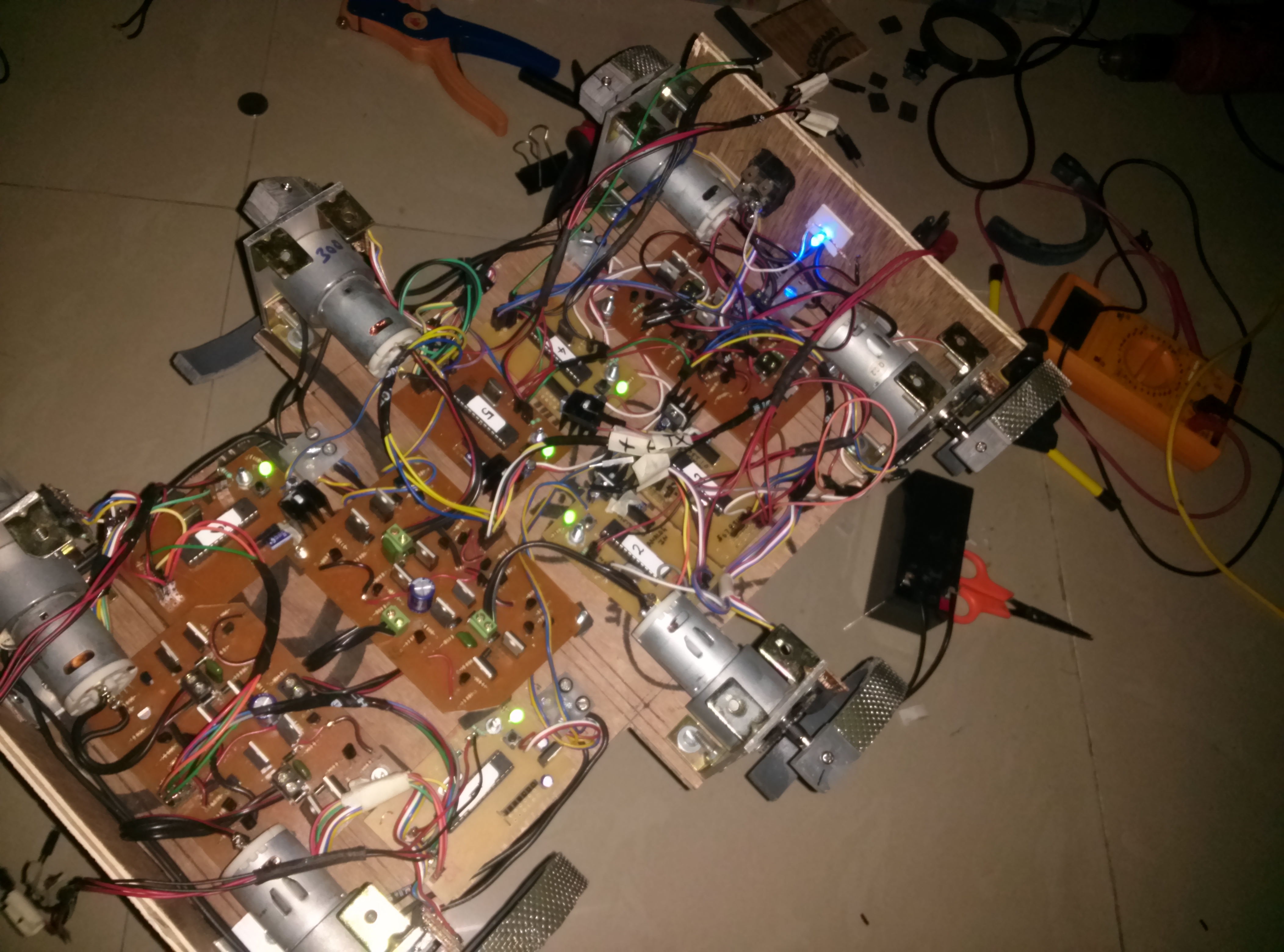
RHex is a six-legged robot with inherently high mobility. Powerful, independently controlled legs produce specialized gaits that devour rough terrain with minimal operator input. RHex climbs in rock fields, mud, sand, vegetation, railroad tracks, telephone poles and up slopes and stairways. It had been made completely from scratch. Almost every part of this project is homemade.
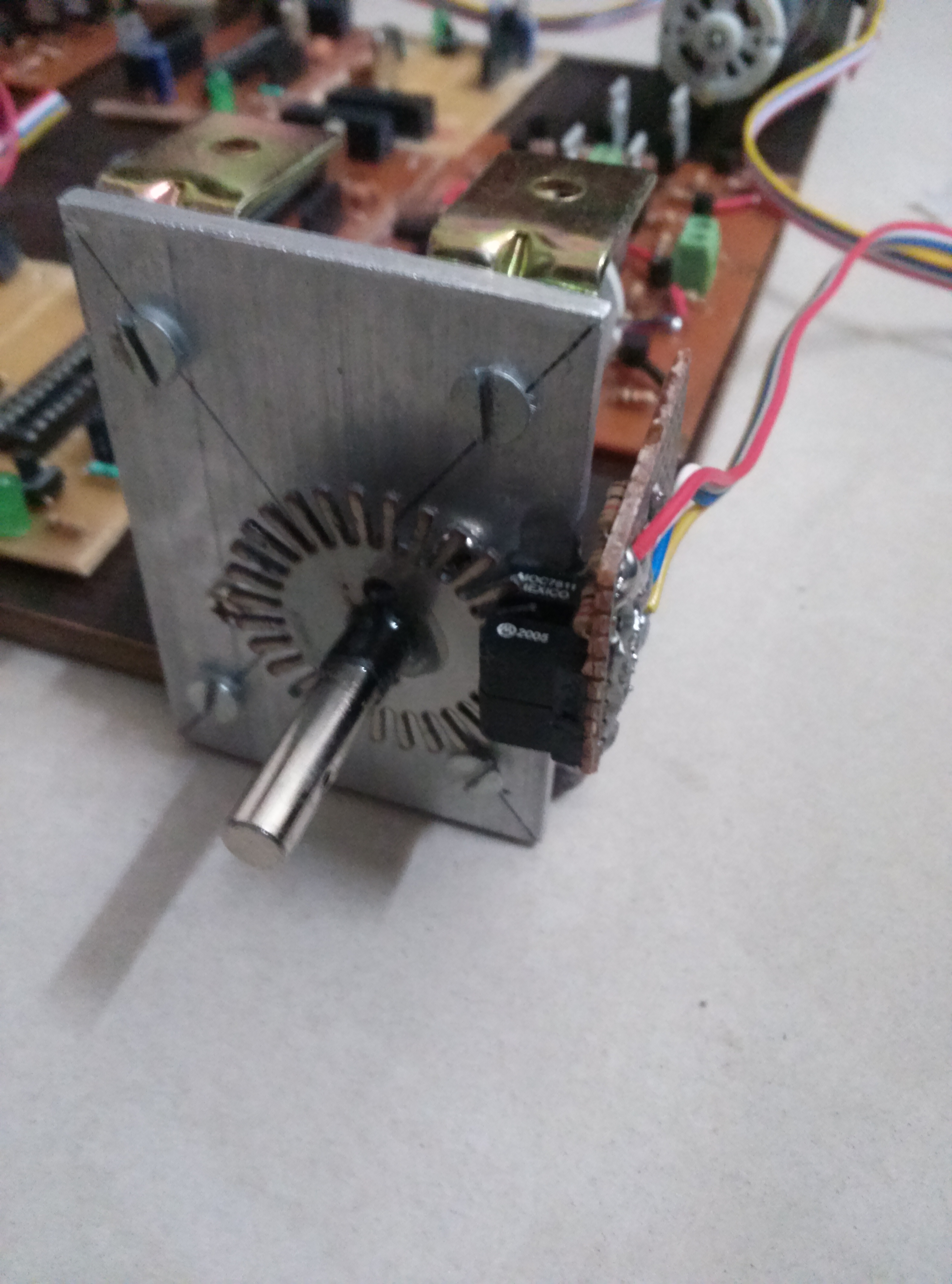
I have used 6 arduinos, 1 for every motor connected to the legs. The speed of the motor is calculated using the Quadrature encoder which is connected to the motor, and PD controlling of the motor speed and position is done by each arduino. The 6 arduinos communicate with each other in such a way that that a stable gait is obtained.
Check my blog to gain more info on PD motor controlling and quadrature encoder:
https://www.robotshop.com/letsmakerobots/arduino-pid-motor-controller







Will add the complete info and code soon
It can walk on any terrain, can even climb stairs.