

In this project, I restored an old Rhino Robot from the 1980's.
Each and every one of the hundreds of parts was disassembled, cleaned, oiled, unstuck, replaced, polished, and/or painted where appropriate.
- The frame was painted with a blend of Sunrise Red and Safty Red.
- All Brass parts were polished to a shine. (See pictures and video)
- The aluminum parts on the gripper were also polished to a shine. (See pictures and video)
- All 6 motors were rebuilt, cleaned, and oiled. Replaced where needed.
- All 6 gray Motor Cables were replaced with new colorful rainbow ribbon cable. (See pictures and video)
- All 6 motor "Home Position" switches were tested. Replaced where needed.
- All Chains were cleaned and lubricated with chain lubricant.
- All plastic parts were inspected and replaced where needed.
- All Electronic Parts were verified to work properly.
- All Power Supply Voltage were verified to be operating at the correct levels.
- Black Heat-Shrink tubing was added to the motor connectors for durability.
- A Red Braided Sleeving Cable Harness was added to manage and guide the ribbon cables going to the gripper.
- The Black Hex Screws holding the frame together were replaced with stainless steel screws to give the frame an ornate look and give the robot some flair. (see pictures and video)
As a final touch, I designed a new Arduino Sheild to control all 6 motors - which can be seen on facebook
https://www.facebook.com/RhinoRobot/
The final goal? Play online checkers.
Looking down into the arm.
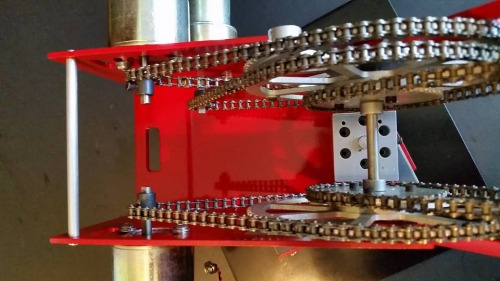
The arm without the gripper.

One motor with chain.

Painting the Arm Segments.

The New Controller that I am calling the MegaMotor 6 is an open source controller based on the Arduino Architecture.
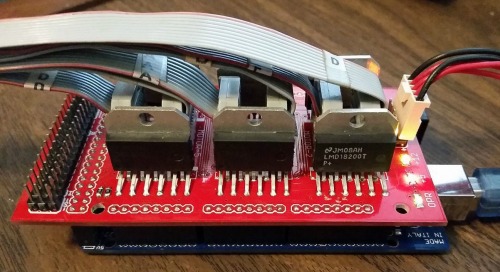
It features:
- 6 DC Motor channels with encoders and current sense for stalls.
- USB connection to PC.
- User assignable Digital I/O ports.
- User assignable Analog input ports.
- WIFI port.
- Pixy Camera port.
All 6 channels have the following features:
- Large power output: 3-Amp (5-Amps peak) 12-55Volts
- PWM Speed Control that allows each axis to move at an independent speed.
- Direction Control
- Active Braking
- Current Sense that allows the unit to detect when an axis has reached the limit or when the gripper has tightly gripped an object.
- Thermal Protection
- Quadrant Encoding for accurate positioning.
- Syncronised PID (proportional–integral–derivative) that allows the movements of all 6 axes to work in unison.
Based on the Arduino Mega, this controller fully replaces the original Mark I, II, III, and IV controllers that came with the Rhino Robots. http://www.rhinorobotics.com/markiii.html
The Company still has a functioning website: http://www.rhinorobotics.com/xr3_flyer.html
You can pick up an old arm yourself on eBay:
The Company still has a functioning website: http://www.rhinorobotics.com/xr3_flyer.html
You can pick up an old arm yourself on eBay:
http://www.ebay.com/sch/i.html?_odkw=Rhino+Robots&_osacat=0&_from=R40&_trksid=p2045573.m570.l1313.TR0.TRC0.H0.XRhino+Robot.TRS0&_nkw=Rhino+Robot&_sacat=0
- CPU: Arduino Mega
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/restored-and-customized-rhino-robot-robotic