Hello Community,
I am using the Rover Robot and I’m attempting to read pin values on the Arduino board extension. I specifically want to read pin #6 on the XBee2 section of the board (see attached images for location). Does anyone know what this pin value is in order to use digitalRead?
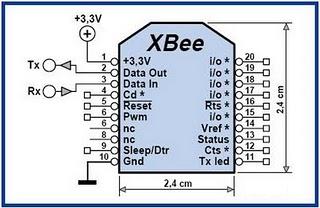
From my understanding, when the XBee switch (see image) is moved to XBee2, pin #2 (on XBee 2 section) becomes Tx, and pin #3 becomes Rx.
Thanks in advance.
According to the schematic, the XBee pin headers are J1, J2, J3 and J5
It’s likely that XBee 2 is J5 and J3, meaning that pin is connected to ground.
If you were to use XBee 1, that pin would be either connected to D6 or D13.
The schematic could be a bit more clear as to which jumpers are associated with which XBee and which side. You can try reading D6 and D13 just in case.
Any particular reason / application?
Hi @cbenson,
I am attempting to wirelessly control the Rover and read the RSSI value of the XBee connected. According to the XBee 1 schematic, I will have to read pin #6 (see attached image). I was unsure how to read pins on that part of the board, I’m finding the schematic a little confusing.
My aim is to implement a localization algorithm with the RSSI value and communicate its position in a WSN.
Thanks for the help,
N
The schematic could use a bit of updating indeed. Worst case scenario, there are breakout pins next to the 2mm XBee headers, so you can solder a pin header and connect a wire between it and another pin on the rover, ensuring you have the right one.





