

Hi everybody,
First i present myself, so i am a 19 years old boy from france, i am actually studing at the university in tours !
I like technologics hackings and i like that website !
The first idea of my project :
First i wanted to make a robot, controlled by a computer and using the WiFi Wireless, I have do it fastly, but on a day i post my project in a forum, and the people tell me "Why did you doesn't make a RC mower ?" my first reaction was "WTF ?" but i was thinking about it on my head, and i decided to try to make a RC mower ..And now it's in process
What does it looks like ?

Actualy it runs with two wipers motors, two olders wheels from a mower (tracted wheels) and two rotating wheels for industries,
I have also a Webcam HD for watch from my computer around the robot,
It use a router for communicate in WiFi to the control device !
It dont have the lawn for cut the grass actually but i will put it on the futur !

How does it works exactly ?
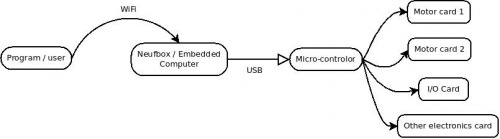
Ok it have 3 parts !
1/ The first one is the device from where the user control the robot, so it can be a computer or a android phone, for the computer i make a program in Java for be used in every computers (linux / windows / mac) And in my android phone i make the program in Java too.
The computer or the Android phone, communicate to the robot by using the WiFi wireless from the router who is on the robot !
2/ Second part : The embedded device ! That device is very important, it's the device who make the "interface" between WiFi communication from the computer or the android phone, to RS232 to the controlor card !
It's actually an older router, called as "Neufbox" it's a french router from SFR (It's a french ISP), I put on it a OpenWrt distribution, so i can control it as a computer, with SSH for exemple, and i can make programs for it in C language !
It have actually two programs from myself : The first one for do the interface between orders from the user to the controller card, and the second program is for stream the HD webcam over http web page (around 15 FPS but i can easy go up to 30 FPS without any lags !)

In the picture you can see the USB cables from : The MSP430 board, and the webcam !
3/ And then, i have the MSP430 board, who receive orders from the router with USB cable and control the motors card,
That board is easy to use, low cost, low consumation, so it's good for my project.
Actualy she is on an electronic box (the white box in fotos) that box includes all the electronics cables, fuse, and switches,
I cant open the box because it's difficult to close it afther, so i take external fotos of the box, and a foto of an MSP430 board (i have many MSP430 boards at home !)

You can see the two switches on that foto ! One is for the power of the router, the second is for the power of the motor cards ! And it's fused inside !

MSP430 board
And now what can i do ?
I am watching for add servo motors for control the camera tilt and pan
I am watching for add two drills motors for turn the lawn and cut the grass
I am watching for achieve the android control application, because actually i have two differents apps, one for control the robot, and the second for see the webcam of the robot, so i need to make only one application, maybe i will make one window with the webcam on the right and buttons on the left, And an other windows with the webcam in full screens and 4butons for control only the webcam (like an HUD in airplanes !)
For more security i think i will not use a lawn but that for cut the grass : 
About consumation ?
The router consumation with WiFi active, webcam plugged, and MSP430 plugged, is around 0,54Amps
When the motors are active the consumation is around 2.6 Amps, less than 3Amps ! Except if i go front and back rapidly : that make a intensity pic up to 5Amps
I have a 12v - 17Ah batterie but in the tests i use a PC computer power source (because it's borring to charge the batterie afther the tests ..) But when it runs it have the batterie onboard for watch the consumation with the weigh of the batterie on the robot !
So actually the consumation is good, but if i add the drill motors maybe it can make troubles, because one drill motor is around 1.3Amps without charge, so i will see it ..
---------------------------------------------------
Dont hesitate to watch my website where you can find tips for exemple how to make a openwrt image, how to compile programs for openwrt environement, how to control a MSP430 launchpad with openwrt and much more ! The same for my videos and comment my website / videos, in english i will respond in english !
Thanks !
RC lawnmower for cut the grass from my android phone !
- Control method: USB, WiFi
- CPU: MSP430 launchpad, neufbox (OpenWrt router), Android phone
- Operating system: Linux, Android, Ubuntu, Openwrt
- Power source: Batterie 12V-17Ah, PC source power
- Programming language: Java, C
- Target environment: outdoor, On the grass
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/rc-lawnmower-controlled-by-android-phone
