Dear: LMR
Hey I am just letting you know I am building another robot. It is all terrain and powered by a eight volt power source which are four AA batteries that are Nihm. It uses an arduino uno, a L298N motor driver, raspberry pi, and a pixy CMUCam5. The chassis was stolen from an RC construction vehicle hacked so it is without the construction vehicle part and just the chasis.
In the end it will be an FPV all terrain vehicle. It will not have a raspberry pi on it by the time I am through with it. I am not even sure if it is still going to use the pixy cmu bu the time I am through with it because I am still trying to figure out how to make it wireless.
Wish me good luck!!! Thanks!!!
From: Noah
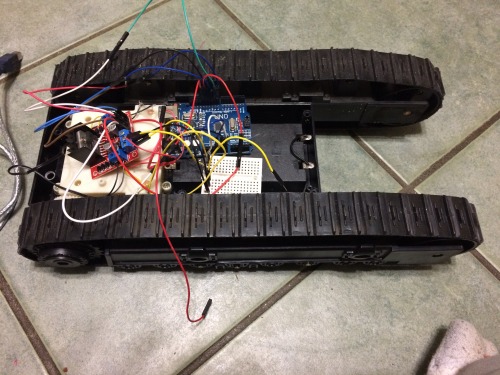
The picture above was the robot without any sensors, the pi, and the power switch. This picture was taken 5/6/2017
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/rc-fpv-on-tracks
Looking forward to seeing how you progress
Nice chassis. You can keep it looking professional by 3D printing your own frame to fit onto it.
I know you said lasers, but Kinect might still work.
I absolutely love the platform. This is quite an ambitious project,
I can’t help but wonder if a 4Gb Latte Panda would be powerful enough to run your Kinect Sensor (or smaller equiv) to give you the 3D mapping you want. It ran my stuff for a time, which was hundreds of MBs of cached mem as well as SQL Server, Web Server, NLP, etc. Maybe it could run the Kinect middleware.
You would probably want a big panning thing or small lazy susan. You might be able to keep it down to weight you need.
I don’t think I should 3D print everything lol.
I don’t think everything is meant to be 3D printed lol. Sometimes it is nice to go outside the box if you know what I mean. Thanks though!!!
Good idea but IDK
Good idea with the panning thing but Idk if I should do it because it sounds like a lot of work and Idk how neccessary it would be. I think it would still work fine without the panning thing but Idk one way to find out. I don’t think I am going to use a kinect sensor for the project but definitely something to consider. Thanks!!! I like the platform too. Awesome!!!
Doubt in my project
I’m a beginner in these jobs and I want to make a system that just walks forward when I try to shut it down. My question is whether I should buy a car kit with encoders or without. In what cases are encoders justified?
Hi,you use encoders, if you
Hi,
you use encoders, if you want to track how many rotations each wheel did, for example to keep track of the position.
Am I understanding right that you want a robot that if you come too close drives away ? In that case you would’t need encoders. You would need a sensor to read the distance to everything that is in front of your robot and if it is too close you drive until the distance is great enough. You could use an ultrasonic range finder like the hc-sr04 to measure the distance.
I would love to hear more about your project in a forum
Dear: Mr_xibant
Just letting you know I would love to hear more about your project but maybe in a forum because you will get more help and I have a lot of question if you make a forum about this. Good luck!!!
From: noah
If you want wireless you
If you want wireless you could setup webiopi on your Raspberry Pi and let it serve a web page that displays a control panel that you use to control the robot using any smart device on the same network.
Failing that it’s standard R/C or Bluetooth is another option. Depends how remote. My current robot can be driven around when I can’t even see it the onboard camera streams a video image to the same web page using mjpg-streamer.
I think a esp2866 will do that as well.
I am actually hoping to use a esp2866 instead but I appreciate your help. Thanks!!!

