This is my first robot project.
I am an electronics and computer systems engineer with over 20 years experience.
When I was looking to do this in the past the size and cost of the technology was too big. Last year I saw a NOVA program on drones and decided that this can be done on a reasonable budget. I decided to go wiht the Arduino for I/O and a Raspberry Pi for the Brains.
This is my R1D1 project (Rev1 Dorid1). I started building this last December but had an issues with the motors I used (old electric car seat motors and gears) the motors did not have enough torque and one had a slightly differing gear ratio. I did however construct the basic platform (all aluminum) and the basic software for driving the motors (Arduino), and on the Raspberry pi I have a web page interface, Wifi, and communication with the Arduino over the USB using virtual serial ports.


Then summer (no time for robots)
This December I started again with 2 new motors I ordered off ebay. Drive problems solved. At this time I have upgraded to the Arduino Mega (note that timer1 on the Audunio mega is pins 11,12 not 9,10 like the UNIO so had to remap pins and change code for motor controler) and added ultrasonic sensors, encoders on the dirve gears, battery V monitor,ildeler gear. Next is GPS, compass and Pi camera and a more permanent ultrasonic mounting . Then much programming as I want this to be an autonomous robot.
In the 2nd pic below you can see the optical encoder I use on the motor output gear.
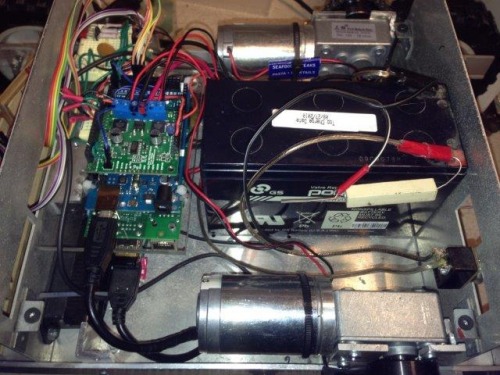


Note that the power switch on outside of case is useful as i had a code bug and it went crasy. i had changed the LED pin and the motor pins on the controler and loaded old code.
At this time I can give it commands over a web page and it goes fwd, back, left, right, and stops if something is in the way.
it will with any luck bring me driks and stuff ouside in the yard
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/r1d1
There are a few of us doing very similar things
Just packaged a little differently.
Welcome aboard. It’s a bumpy ride, but oh so much fun…
**Thanks, I wanted something rugged **
Thanks,
I wanted something that can bring me drinks outside. Thus the lawnmower wheels and 4x4 drive
This will be the base unit I may even cut the case down a bit but wont know how much room I have until I get closer to the final design. I am planning on a tray attachment about 2 ft high for drinks and maybe some way to get beers out of the fridge.
Anyway nav system next. I was hoping that I could find code for navigation that is close to what I want just go from point A to point B “simple right L”.
I have ordered a cheap gps and compass for that. As you say u r a unix guru I will tell you that I am using pearl CGI scripting at this time with a daemon running as a service that talks to the Arduino on the USB com port (with a made up protocol). I also plan on putting in a Raspberry pi web cam. I will attach the GPS to the PI as that has more processing power and I can use pre canned code to get the coordinates form the raw GPS data. The Pi will do the navigation just telling the Arduino what direction to go and how many clicks on movement sensors.
You are probably going to find you need wheel encoders
Now with your chain drive system, it might as very simple as running the chain over a limit switch, such that it senses each link.
Here is some of my work on managing a Raspberry Pi / Arduino bot over the Internet :
and my bot that I’ve applied this code to. https://www.robotshop.com/letsmakerobots/node/39791
**Thanks,
I do have encoders**
Thanks,
I do have encoders on the output gears of the motors. you can just see them in the pic. the black plastic bit below the gear. I went to add that to the web page but was having issues with the editor.
I need to go over the page and add details. but you know wife, kids, work, cars (I also work on hot rodding cars …) all take away time.
Frank 
**BTW:
Coding examples are**
BTW:
Coding examples are always useful and yes i saw your page (great work) I also have some optical sensors i was going to use pointing down so my robot does not fall down steps … maybe fwd and back also depending on how well the sonic ones work. i also was thinking of adding a bumper with micro-switches. this thing weighs about 8Lbs and has lots of power.
I was going to use 2 sonic dist sensors back and front but found that i needed 3 to cover one direction. this is why they are on plywood for now as i am still fine tuning the array.


