



R1D1
This is my first robot project.
I am an electronics and computer systems engineer with over 20 years experience.
When I was looking to do this in the past the size and cost of the technology was too big. Last year I saw a NOVA program on drones and decided that this can be done on a reasonable budget. I decided to go wiht the Arduino for I/O and a Raspberry Pi for the Brains.
This is my R1D1 project (Rev1 Dorid1). I started building this last December but had an issues with the motors I used (old electric car seat motors and gears) the motors did not have enough torque and one had a slightly differing gear ratio. I did however construct the basic platform (all aluminum) and the basic software for driving the motors (Arduino), and on the Raspberry pi I have a web page interface, Wifi, and communication with the Arduino over the USB using virtual serial ports.


Then summer (no time for robots)
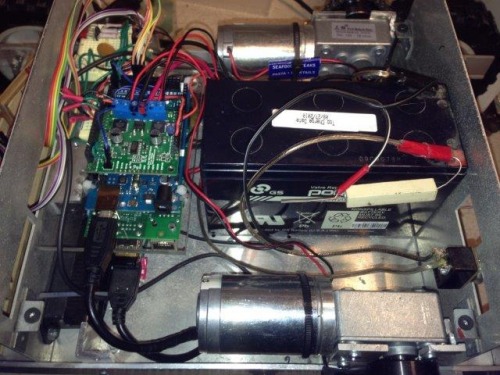
This December I started again with 2 new motors I ordered off ebay. Drive problems solved. At this time I have upgraded to the Arduino Mega (note that timer1 on the Audunio mega is pins 11,12 not 9,10 like the UNIO so had to remap pins and change code for motor controler) and added ultrasonic sensors, encoders on the dirve gears, battery V monitor,ildeler gear. Next is GPS, compass and Pi camera and a more permanent ultrasonic mounting . Then much programming as I want this to be an autonomous robot.
In the 2nd pic below you can see the optical encoder I use on the motor output gear.


Note that the power switch on outside of case is useful as i had a code bug and it went crasy. i had changed the LED pin and the motor pins on the controler and loaded old code.
At this time I can give it commands over a web page and it goes fwd, back, left, right, and stops if something is in the way.
it will with any luck bring me driks and stuff ouside in the yard