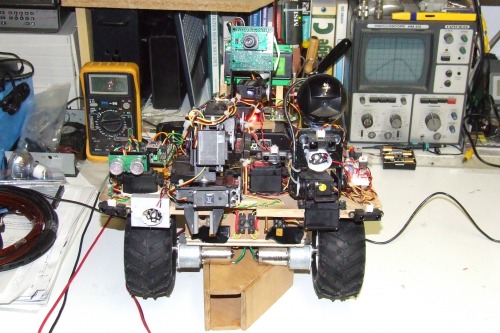
I have just finished the modification of the bot, I added a laser for use with cmucam. I finally managed to operate the joystick with my small robot ....! ...
This is the version beta, it is equipped with an arm, many sensors (4 GP2D12, 1 GP2D15, 1 SRF04) + light + temp. + compass i2C + Display module LCD03 + 2 experimental plates ( 1 for the power annexe(2 Luxeon LED 3w), CMUcam3 ,1 for 16F84 to convert signal to be compatible with Qwerk) and camera. I've add a basic stamp module and hub usb with key 2Go. Now, I added a laser for use with cmucam.
Wow! You’ve accomplished so much more with the qwerk than I have! All I have hooked up at the moment are a couple of LEDs and an IR sensor. Would I be able to control those through your custom diffdrive client?
? Hey, I was trying to connect. Do I connect directly using a peer? Or through a relay? What is the host name I need to enter. Incredible robot by the way. Very cool.
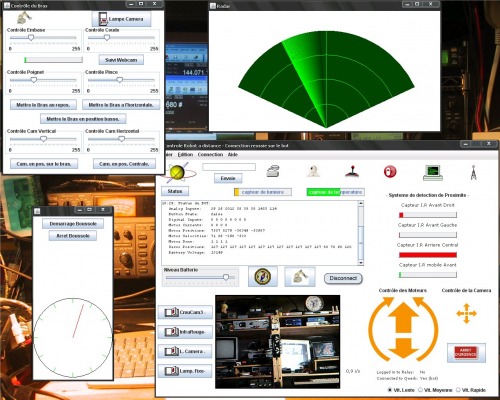
The first camera (Logitech Communicate STX Camera) is used for browsing the Internet. The second(cmucam3) used for tracking objects, color etc… but this is under development.
For the time being the remote control is in direct connection with vpn. I am currently developing a simple interface to control anonymous with simple actions. I did not want to see the finished robot spare parts .
By against I am currently breaking my head to operate the joystick with the sources of the architecture of Terk. I get this error if someone has an idea?If someone has managed to control the Querk with the sources of TeRK (diffdrive) because my skills are limited …
Exception in thread "AWT-EventQueue-0" java.lang.UnsatisfiedLinkError: getNumDevces at edu.cmu.ri.mrpl.TeRK.client.diffdrive.com.centralnexus.input.Joystick.<clinit>(Joystick.java:186) at edu.cmu.ri.mrpl.TeRK.client.diffdrive.DiffDriveClient$10.actionPerformed(DiffDriveClient.java:2012) at javax.swing.AbstractButton.fireActionPerformed(Unknown Source) at javax.swing.AbstractButton$Handler.actionPerformed(Unknown Source) at javax.swing.DefaultButtonModel.fireActionPerformed(Unknown Source) at javax.swing.DefaultButtonModel.setPressed(Unknown Source) at javax.swing.plaf.basic.BasicButtonListener.mouseReleased(Unknown Source) at java.awt.Component.processMouseEvent(Unknown Source) at javax.swing.JComponent.processMouseEvent(Unknown Source) at java.awt.Component.processEvent(Unknown Source) at java.awt.Container.processEvent(Unknown Source) at java.awt.Component.dispatchEventImpl(Unknown Source) at java.awt.Container.dispatchEventImpl(Unknown Source) at java.awt.Component.dispatchEvent(Unknown Source) at java.awt.LightweightDispatcher.retargetMouseEvent(Unknown Source) at java.awt.LightweightDispatcher.processMouseEvent(Unknown Source) at java.awt.LightweightDispatcher.dispatchEvent(Unknown Source) at java.awt.Container.dispatchEventImpl(Unknown Source) at java.awt.Window.dispatchEventImpl(Unknown Source) at java.awt.Component.dispatchEvent(Unknown Source) at java.awt.EventQueue.dispatchEvent(Unknown Source) at java.awt.EventDispatchThread.pumpOneEventForHierarchy(Unknown Source)
at java.awt.EventDispatchThread.pumpEventsForHierarchy(Unknown Source) at java.awt.EventDispatchThread.pumpEvents(Unknown Source) at java.awt.EventDispatchThread.pumpEvents(Unknown Source) at java.awt.EventDispatchThread.run(Unknown Source)
You are missing a JNI .dll or .so. The "UnsatisfiedLinkError" is common for missing native code. Java does not inherently have access to hardware, so often the way around this is to use JNI which is compiled into a windows dynamically loaded library or a Linux shared object.
getNumDevces (sp?) - is probably trying to find the location and number of Joysticks
Typically this means you need a .dll or .so library in a reachable path.
For windows you can put it in the %SystemRoot%\system32 directory
Yes jjstick.dll is in the system directory, demo and my program used this dll.
I’m testing to put it in the same directory and I get the same error :
Exception in thread “AWT-EventQueue-0” java.lang.UnsatisfiedLinkError: edu.cmu.ri.mrpl.TeRK.client.diffdrive.Joystick.getNumDevices()I at edu.cmu.ri.mrpl.TeRK.client.diffdrive.Joystick.<clinit>(DiffDriveClient.java:428) at edu.cmu.ri.mrpl.TeRK.client.diffdrive.DiffDriveClient$10.actionPerformed(DiffDriveClient.java:2738)
No, I am currently No, I am currently developing a simple interface to control anonymous with simple actions. I did not want to see the finished robot spare parts .