



Qwerk 3.0b ;-)
I have just finished the modification of the bot, I added a laser for use with cmucam.
I finally managed to operate the joystick with my small robot ....! ...
http://f5pql.ath.cx/gallery2/main.php?g2_itemId=1542
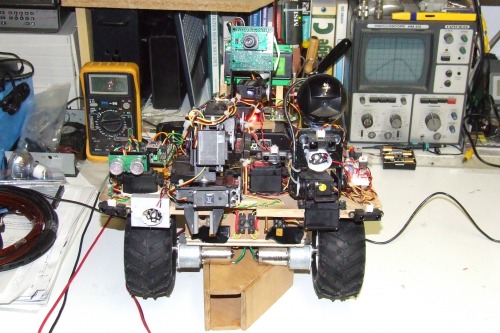
This is the version beta, it is equipped with an arm, many sensors (4 GP2D12, 1 GP2D15, 1 SRF04) + light + temp. + compass i2C + Display module LCD03 + 2 experimental plates ( 1 for the power annexe(2 Luxeon LED 3w), CMUcam3 ,1 for 16F84 to convert signal to be compatible with Qwerk) and camera. I've add a basic stamp module and hub usb with key 2Go. Now, I added a laser for use with cmucam.
http://f5pql.ath.cx/gallery2/main.php?g2_itemId=1545
For the moment the alimentation is 12V by alim and Accu 7.2V 4500mA. I create a balise to allow the load of Qwerk.
http://f5pql.ath.cx/gallery2/main.php?g2_itemId=1536
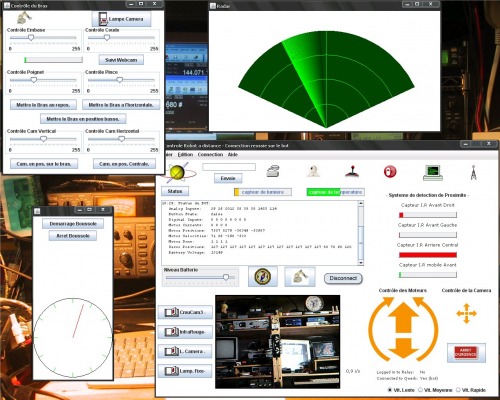
Now ! This is my new DiffDriveClient
http://f5pql.ath.cx/gallery2/main.php?g2_itemId=1616
You have the possibility to test it at :
http://serveurperso.ath.cx/apps/diffdrive.jnlp
John
Navigate around via ultrasound, Navigate Around Obstacles, Remote Controlled via Internet
- Control method: The robot is controlled with WiFi and might be autonomous in the future with GPS., Semi-Controlled
- CPU: 200 MHz ARM9 RISC processor (onboard); remote PC, Querk
- Operating system: Linux, java
- Power source: 7.2 V 3300 mAh racing pack or 12Volts
- Programming language: Java, C#, Visual Basic
- Sensors / input devices: 4 GP2D12, 1 GP2D15, 1 SRF04, 1 CMP03
- Target environment: Indoor or outdoor, Indoo